CN100588375C - 用于远程操纵抓持工具的手致动设备 - Google Patents
用于远程操纵抓持工具的手致动设备 Download PDFInfo
- Publication number
- CN100588375C CN100588375C CN200580047088A CN200580047088A CN100588375C CN 100588375 C CN100588375 C CN 100588375C CN 200580047088 A CN200580047088 A CN 200580047088A CN 200580047088 A CN200580047088 A CN 200580047088A CN 100588375 C CN100588375 C CN 100588375C
- Authority
- CN
- China
- Prior art keywords
- joint
- chain link
- finger
- effector
- motion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0052—Constructional details of control elements, e.g. handles
- A61B1/0053—Constructional details of control elements, e.g. handles using distributed actuators, e.g. artificial muscles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0055—Constructional details of insertion parts, e.g. vertebral elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B17/07207—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously the staples being applied sequentially
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/77—Manipulators with motion or force scaling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/02—Hand grip control means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/06—Arms flexible
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/06—Programme-controlled manipulators characterised by multi-articulated arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/104—Programme-controlled manipulators characterised by positioning means for manipulator elements with cables, chains or ribbons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
- A61B2017/00323—Cables or rods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0042—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping
- A61B2017/00424—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping ergonomic, e.g. fitting in fist
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0042—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping
- A61B2017/00438—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping connectable to a finger
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2905—Details of shaft flexible
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
- A61B2034/306—Wrists with multiple vertebrae
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/038—Automatic limiting or abutting means, e.g. for safety during shipment
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/19—Drive system for arm
- Y10S901/21—Flaccid drive element
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
- Y10T74/20323—Robotic arm including flaccid drive element
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20396—Hand operated
- Y10T74/20402—Flexible transmitter [e.g., Bowden cable]
Abstract
本发明提供了一种铰接机构,该铰接机构可用于例如在身体区域内或向身体区域远程操纵各种外科器械和诊断工具。位于机构近端(106,107,121,606,806,1711,1801)的节段(A1,B1,D1)的运动导致位于机构远端(108,109,123,604,808,1721,1822)的节段(A2,B2,D2)发生对应的相关运动。近端和远端节段通过一组缆索(104)连接,使得各近端节段与一远端节段形成分离的对。该构型允许各对节段相互独立地运动,并且还允许铰接机构进行复杂运动并采用复杂构型。该铰接机构还可组合用于远程模拟手指运动,以操纵目标或身体组织。
Description
对相关申请的交叉参考
本申请是于2003年5月23日提交的美国申请No.10/444,769的延续部分,该美国申请公开的内容引用在本申请中作为参考。
技术领域
本发明涉及铰接机构及其应用,该应用包括外科或诊断器械和工具的远程引导和操纵。具体地,本发明涉及用于远程操纵身体组织的手致动机构。
背景技术
在许多行业和应用场合尤其是希望在难以用手进入或者否则就会带来危险的空间中控制器械或工具的运动时,容易地远程操纵器械和工具的能力是大家所关心的。这些可包括在外科手术中工具或器械的应用目标位置难以接近的情况、或机械的制造或维修、甚至其中手动地进入目标位置受限的商业和家庭使用。其它情况可包括例如其中工作环境对于使用者是危险的例如暴露在危险化学物质下的工作空间的工业应用。另外的情况还可包括其中使用者处于危险之中例如将工具或器械部署在危险或敌方位置的法律实施或军事应用。
使用外科手术作为说明性示例,例如内窥镜和腹腔镜检查的手术通常从身体外部的位置使用在目标器官或组织内或朝该目标器官或组织转向的器械。内窥镜检查手术的示例包括乙状结肠镜检查、结肠镜检查、食管胃十二指肠镜检查和支气管镜检查。内窥镜的插入管通常通过推动而前进并通过向后拉而缩回。管的尖端可通过扭转和大致向上/向下以及向左/向右的运动而被引导。此有限的运动范围常常会使得难以转过锐角(例如在直肠乙状部结肠内),从而导致患者不舒适并且增加损伤周围组织的危险。
腹腔镜检查包括根据解剖标志放置套管针孔口。孔口的数量通常随预期的手术、获得令人满意的组织活动所要求的器械数量、以及操作区域的暴露而变化。尽管腹腔镜外科存在许多优点,例如较少的术后疼痛、较早的活动、以及减小粘连形成,但是常常难以通过腹腔镜孔口实现器官的最优牵拉以及传统器械的可操纵性。在一些情况中,这些缺陷会导致外科时间增加以及部件例如人造纤维和缝合线的不精确放置。
可转向的导液管对于诊断和治疗应用也是公知的。类似于内窥镜,这种导液管包括可在基本有限的运动范围内被引导以通过患者的脉管系统的尖端。
已做出许多努力来设计可控性提高的内窥镜以及导液管。例如,Sato的US 3557780、Ailinger等的US 5271381、Alotta等的US 5916146、以及Sakai的US 6270453说明了具有可通过致动一组线而被弯曲的一个或多个柔性部分的内窥镜器械。这些线被通过转动小齿轮(Sato)、操纵旋钮(Ailinger等)、可转向的臂(Alotta等)或者通过滑轮机构(Sato)从器械的近端致动。
Boury等人的US5916147公开了一种具有四条线的可转向导液管,该四条线在该导液管的壁内行进。每条线在导液管的不同部分终止。线的近端从套管针松弛地延伸出,从而医生可拉动它们。医生能够通过选择性地拉紧线来使导液管成形和使该导液管转向。
尽管上述每个设备都可远程转向,但是它们的运动范围通常有限,这至少部分地是因为通常仅使用单个缆索组来连接可转向元件的链节(link)或节段。因此,不可实现各链节或节段处的独立运动。相反,远端链节或节段作为一个或多个单元一起弯曲。转向机构的使用比较费力,例如在Boury等的导液管内,其中必须单独拉动每条线以使导液管成形。此外,在例如使用旋钮和滑轮机构的内窥镜和可转向导液管的情况下,需要大量训练来熟练操纵设备穿过患者的体部。
因此,用于可控地通过复杂体部的具有提高的远程可操纵性的设备可使器械和工具更高效和精确地前进和布置、并帮助减小对周围组织的损伤、使患者的不舒适度最小、并在各种外科手术期间减小操作时间甚至可能减小患者发病率。也是有利的是,这种设备提供更直观和流畅的使用者接口(interface),以实现这种提高的可操纵性。
将人的手指的运动精确地转变成外科器械或工具的运动的使用者接口是一种实现改进的远程可操纵性的方法。尽管已做出许多努力来实现这种设备例如Ortiz的US 5441494、Viola等的US 5807376、以及Daum等的US 5813813内所述的设备,但是仍需要一种具有改进的控制和运动范围的设备。
因此,非常需要一种设备,该设备不仅可提供手控使用者接口而且还提供允许接近地模拟人手运动以提高远程可操纵性的致动机构。
发明内容
本发明提供了一种可用于多种用途的铰接机构,该用途包括但不局限于器械例如外科或诊断器械或工具的远程操纵,该器械或工具包括但不局限于内窥镜、导液管、多普勒流量计、麦克风、探针、牵引器、解剖器、缝合器、夹具、抓持器、剪刀或切割器、消融或烧灼元件等。该铰接机构可用于在患者的身体区域内引导这些器械或者将这些器械引导到患者身体区域内的目标位置,并且还可用于致动或有助于这种器械或工具的致动。
在一个变型中,该铰接机构包括多对链节,每对中的每一个链节可保持与该对中的另一链节相互间隔开,以及包括多组缆索,其中每个缆索组使成对的分离的链节相互连接并在每个成对的分离的链节处终止,从而该对的一个链节的运动导致该对的另一链节进行对应的相关运动。铰接机构远端处的相关运动对应于近端处的运动。
在另一个变型中,该铰接机构包括连续柔性部件。该连续柔性部件包括多对节段,其中每对的每个节段保持与该对的另一个节段相互间隔开,以及包括多组缆索,其中每个缆索组使成对的分离的节段相互连接并在每个成对的分离的节段处终止,从而该对的一个节段的运动导致该对的另一个节段进行对应的相关运动。在一些情况中,连续柔性部件可以是例如具有多个内腔的导液管,其中每个缆索组在沿导液管长度的不同轴向位置处终止。在另外的情况中,连续柔性部件具有螺旋状设置,其中各节段对应于该螺旋的一圈。如果需要的,柔性联接件可放置在螺旋节段或链节之间。
铰接机构的变型还可包括节段或链节,该节段或链节包括用于接纳可将铰接机构的近端固定和保持在固定位置的锁定杆的通道。可将锁紧套而不是锁定杆装在机构的近端,以将近端固定和保持在固定位置。
外科或诊断工具可连接到根据本发明的铰接机构的远端并从该远端延伸出,或者铰接机构可安装在这些工具中。外科或诊断工具的示例包括但不局限于内窥镜、导液管、多普勒流量计、麦克风、探针、牵引器、解剖器、缝合器、夹具、抓持器、剪刀或切割器、以及消融或烧灼元件。
多个铰接机构还可结合成使得可远程模拟使用者手指的运动,以操纵身体组织的目标。在一个变型中,该机构形成包括多对链节、多组缆索和使用者手控接口的手致动设备,其中每个成对的分离链节中的各链节保持与该对的另一链节相互间隔开,该链节安装在该设备的近端和远端,而对应对的链节分别位于近端和远端,每个缆索组使成对的分离的链节相互连接,使用者手控接口位于该设备的近端并构造成可取下地固定人手的用于运动的一个或多个指部,从而当所述指部被固定到接口时,所述指部的运动可使所述近端的一对中的一个或多个链节运动,并使得在设备远端的该对中的另外一个或多个链节进行对应的相关运动。在一些情况中,一对中的至少一个链节是细长链节。
在另一个变型中,手致动设备包括具有使用者手控接口的近端,该近端构造成可取下地固定人手的用于运动的一个或多个指部,从而所述指部在被固定时所述指部的折曲可转变成在远端受动器部分的弯曲运动。在另一个变型中,使用者手控接口包括手指滑动装置,其中手指滑动装置的平移运动将被转变成受动器部分的弯曲运动。
本发明的手致动设备还在它们的近端和远端包括一个或多个接头,这些接头具有远位指间(DIP)关节、近位指间(PIP)关节或掌部指骨(MCP)关节的运动范围。在一些情况中,近端接头例如MCP关节的运动的控制独立于一个或多个远端接头例如PIP接头或DIP接头的控制。在另一些情况中,设备的近端的运动例如一对中的一个链节的运动或者手指滑动装置的平移被按比例地缩放成在该机构远端的运动例如该对中另一链节或受动器部分的运动。
附图说明
图1A-1E示出根据本发明一个变型的铰接机构的透视图,其中多对链节通过对应的缆索组连接,图1A示出处于其自然构型的铰接机构,图1B-1E示出处于不同操作状态的铰接机构;
图1F是类似于图1A的铰接机构的远端的透视图,其中端部被操纵形成多个弯曲部;
图2A-2E示出用于根据本发明另一个变型的铰接机构的链节的端视图、侧视图和透视图;
图3A-3C示出具有不同形状的杆部分和对应的凹部的类似于图2A-2E的链节的横截面视图;在图3A和3B中,杆部分的远端为凸面状,而在图3C中杆部分的远端为球形;凹部在图3A中为锥形,在图3B中为凹面状,而在图3C中为球形;
图3D是用于根据本发明另一个变型的铰接机构的链节的横截面视图,其中在链节之间设置有球形元件;图3E是类似于图3D的链节和球形元件的横截面视图,并且这些链节和球形元件还包括延伸通过且在链节和球形元件之间连通的中心通道;
图4A-4C是用于根据本发明一个变型的铰接机构的链节的横截面视图,其示出缆索与链节的各种连接模式;
图5A和5B示出用于根据本发明一个变型的铰接机构的单个链节,图5A是透视图而图5B是端视图,所示的链节包括用于接纳和使缆索以及其它元件通过的内腔和通道;
图6A-6C示出根据本发明一个变型的与外科夹具相联接的铰接机构的透视图;
图7是根据本发明另一个变型的与导液管相联接的铰接机构的透视图;
图8是根据本发明另一个变型的与内窥镜相联接的铰接机构的透视图;
图9A和9B是用于远程形成牵开器的铰接机构的透视图,在图9A中,牵开器是“u”形,在图9B中,牵开器具有三角形牵开表面;
图9C是根据本发明另一变型的铰接机构的透视图,其中,该机构连接到使用者的手上;
图10A-10B示出根据本发明另一个变型的铰接机构的透视图,该机构具有包含螺旋形节段的连续柔性部件,多对这样的节段通过对应的缆索组连接,图10B是图10A内所示的螺旋形节段的部分省略的放大视图;
图11是根据本发明另一个变型的铰接机构的透视图,该机构具有包含多个直通内腔的连续柔性部件,并且多对节段通过对应的缆索组连接;
图12A-12B是根据本发明另一个变型的铰接机构的远端的透视图,在该远端连接有组织消融元件;
图13A-13F示出被远程操纵以产生消融性心脏损伤的根据图12的铰接机构的远端;
图14是根据本发明一个变型的具有手指环的手致动装置的透视图,该装置示出处于未致动状态;
图15示出人手在图14的手致动装置内的放置;
图16是图14的手指环的放大的透视图;
图17是处于致动状态的图15的手致动装置的透视图;
图18是根据本发明一个变型的具有手指滑动装置的手致动装置的透视图,该装置处于未致动状态;
图19示出人手在图18的手致动装置内的放置;
图20是处于致动状态的图19的手致动装置的透视图;
图21是根据本发明一个变型的手致动设备的手柄的透视图;
图22是根据本发明一个变型的滑动机构的侧视图;
图23是根据图18的滑动机构的侧视图;
图24是部分拆开的图23的滑动机构的透视图;
图25是图23的滑动机构沿线B-B剖开的横截面视图,示出端部接头滑轮的直径为中间接头滑轮的直径的两倍;
图26是图23的滑动机构的透视图,示出根据本发明一个变型的缆索与滑轮和基部接头的连接;
图27是手柄的透视图,示出缆索的路线选择;
图28是根据本发明一个变型的使用者手控接口的模制手柄的放大透视图,其中缆索通过接口内的通道;
图29是根据本发明另一个变型的使用者手控接口的空心手柄的放大横截面视图,示出缆索通过滑轮确定路线;
图30是图14的手致动装置的受动器部分的放大剖视图;
图31A-31C是图30内的受动器的接头的放大剖视图;
图32是图31A和31B的受动器的接头的放大侧视图,其中接头垂直取向;
图33是图31C内的受动器的接头的放大侧视图,其中接头垂直取向;
图34是形成图30的受动器部分的一部分的受动器链节的分解视图。
具体实施方式
根据本发明的铰接机构包括多对链节或节段以及多组缆索。铰接机构可用单独的、分隔开的节段即链节制成,或用由连续柔性部件形成的节段形成。文中使用的术语“链节”和“节段”是指在机构的一端的分离部分或限定区域,其对应于在机构的相对端的另一个分离部分或限定区域。无论如何,铰接机构将包括作为成对的分离部件的多个链节或节段。链节或节段形成近端和远端,每对的一个链节或节段位于近端,而另一链节或节段位于远端。如下文将进一步说明的,用连续柔性部件形成的链节或节段的形式为例如连续的管,或者可处于例如螺旋形布置中,其中各对节段应于螺旋的一圈。
每个缆索组使成对的分离的链节或节段相互连接,从而一对中的一个链节或节段的运动会导致该对中另一链节或节段发生相应的运动。能够操纵各链节允许机构容易地形成复杂的三维构型和几何结构,下文将进一步详细说明。对于依赖缆索组或线的传统铰接设备,难以获得这样的复杂几何结构,因为这种设备通常设计成使转向缆索或线通过每个节段并且在最远的节段处终止。因此,所有节段共同响应线或缆索组的运动而一起通常以曲线或弓形形式弯曲。例如,Alotta等的US 5916146中所述的设备具有这样的构型。
为了说明,将在这样的上下文中说明本发明的铰接机构:用于在身体的远程进入区域内远程引导、操纵和/或致动外科或诊断工具和器械,或者用于身体组织的远程操纵。文中使用的术语“器械”和“工具”可互换并且是指通常被使用者操纵以实现特定目的的设备。文中使用的术语“区域”是指处于它们的病态或非病态的任何实体器官(例如肝脏、肾、脑、心脏)或中空器官(例如食道、肠、胃、膀胱)、任何实体或内脏组织(例如血管或管道)、或者任何体腔(例如窦、胸膜或腹膜空间)。除了外科或诊断应用之外,还可想到铰接机构的其它应用并且对于本领域的技术人员是显而易见的。这些包括但并不局限于工业应用例如将工具、探针、传感器等引导到狭窄空间,或者工具的远程精确操作。其它使用包括其中希望实现复杂几何结构的远程操纵的应用。这些应用包括但不局限于消遣或娱乐例如工具或游戏中的例如木偶、洋娃娃、塑像等的远程操纵。
转到图1A所示的变型,铰接机构100包括多个链节102,该链节形成近端106和远端108。链节A1和A2、B1和B2以及D1和D2分别是成对的分离部件,并且一对中的一个链节在近端106而另一链节在远端108。链节C1和C2是间隔链节,下文将进行更详细地说明。近端链节(A1、B1和D1)通过缆索104连接到远端链节(A2、B2和D2)。间隔元件112设置在近端106和远端108之间以将近端链节与远端链节隔开,并保持它们处于分隔开的关系。间隔元件112可以是适合于预期应用的任何长度,并且通常为空心以便其可容纳连接链节对的所有缆索104,以及另外的与预期与该机构一起使用的工具或器械相联接的缆索、线、光纤或其它类似的元件。
链节可以是如用途所需的任何大小和形状,但是它们的形式通常取决于因素例如患者的年龄、所关心区域的解剖结构、预期应用和医生的选择。链节102例如通常为柱状,并且包括用于连接该链节对的缆索以及另外的与预期与该机构一起使用的工具或器械相联接的缆索、线、光纤或其它类似的元件通过的通道。通道直径通常稍大于缆索直径,从而形成滑动配合。此外,链节还包括一个或多个用于接纳可连接的外科器械或诊断工具的元件或用于致动它们的缆索通过的通道。根据应用,链节的直径通常为大约0.5mm到大约15mm或更大。对于内窥镜应用,代表性直径对于小内窥镜器械可从大约2mm到大约3mm,对于中等尺寸的内窥镜器械从大约5mm到大约7mm,而对于大内窥镜器械从大约10mm到大约15mm。对于导液管应用,直径可从大约1mm到大约5mm。链节的总长度通常将根据链节之间希望的弯曲半径改变。
在图2A-2E所示的变型中,链节200总体上为柱状,并且还包括杆部分202。链节200可被对齐以便杆部分202的远端206接合相邻节段的表面210内形成的对应的凹部208。杆部分的远端可具有不同形状。例如,链节200a和200b可分别具有凸面状端部206a和206b(图3A,3B),而链节200c具有球形端部206c(图3C)。类似地,只要允许各链节相互接合并且不会限制铰接机构的运动的所需角度,则对应的凹部可具有许多对应的形状,例如凹部206b和206c内的凹状面(图3B和3C)或凹部206a内的锥形(图3A)。
杆部分202的长度通常在大约0.5mm到大于大约15mm,而直径为0.5mm到大约2.5mm。对于内窥镜应用,杆的直径可在从大约1mm到大约1.5mm的范围内。如图2A-2E所示,链节200还可包括用于连接链节对的缆索通过的多个通道212。如图5所示,链节500设计成具有连接通道502,该通道与节段外部连通并且朝节段的周边安置,该连接通道用于在铰接机构的远端安装其它元件例如能量源(用于消融或凝结)或光纤或柔性内窥镜。多于一个链节或节段可包括连接通道,从而该连接通道可从机构的远端延伸到近端。如果希望的话,缆索、线、光纤、柔性内窥镜等还可通过中心通道504。
链节或节段可用任何生物相容的材料制成,这些材料包括但不局限于:不锈钢;钛;钽;以及任何它们的合金;聚合物例如聚乙烯或其共聚物、聚对苯二甲酸乙二醇酯或其共聚物、尼龙、硅树脂、聚亚安酯、含氟聚合物、聚氯乙烯;以及它们的组合。
如果希望的话,可在链节或节段上安放光滑的涂层以有助于铰接机构的前进。光滑涂层可包括亲水聚合物例如乙烯聚合物四氯化吡咯、含氟聚合物例如四氟乙烯,或硅树脂。
在一个或多个节段上还可包含不透射线的标记,以在射线照相成像时指出铰接机构的位置。通常,标记可通过荧光检查法检测。
铰接机构近端的各链节或节段通过两条或多条缆索连接该铰接机构远端的对应的链节或节段。每个缆索组可由至少两条缆索构成。应指出,一对(链节或节段)的运动由与其对应的缆索组控制,并且与任何其它的对无关。在一些变型中,例如,缆索组将包括相互间隔120度的三条缆索。通过使用一组三条缆索连接各链节或节段对,各链节或节段对可与任何其它对独立地在三自由度内被操纵或运动。通过组合多个链节或节段对,可获得多个自由度,从而允许链节形成多种复杂的构型。例如,图1F内所示的变型具有总共9个链节对,各链节对通过一组三个缆索独立地连接,从而可实现27个自由度。在典型的传统机构中不能得到这么多的自由度,其中仅能使用一组缆索来操作链节。
缆索直径根据应用改变,并且可在从大约0.15mm到大约3mm的范围内。对于导液管应用,代表性直径在从大约0.15mm到大约0.75mm的范围内。对于内窥镜应用,代表性直径可在从大约0.5mm到大约3mm的范围内。
缆索柔性可由例如缆索材料的类型和编织法或通过物理或化学处理改变。通常,可根据铰接机构的预期应用的要求改变缆索硬度或柔性。缆索可以是用如下材料制成的单股或多股线,这些材料包括但不局限于:生物相容材料例如镍钛合金、不锈钢或任何其合金、超弹性合金、碳纤维、聚合物例如聚氯乙烯、聚氧化乙烯、聚对苯二甲酸乙二醇酯或其它聚酯、聚烯烃、聚丙烯和其共聚物;尼龙;丝;和它们的组合;或本领域内已知的其它合适材料。
参照图1A,固定在近端链节上的缆索通过间隔元件112,以与该对中的对应的远端链节连接。如图1B-1E所示,近端链节的运动可导致远端链节进行反向的、相应的运动。在其它变型中,缆索可在通过间隔元件112的同时扭曲或转动180度,从而相应的运动在远端108被镜像。本发明的铰接机构可构造成包括扭转0-360度以提供360度范围的相应运动的缆索。
缆索可根据本领域已知的方式例如通过使用粘合剂或通过硬钎焊、软钎焊、焊接等固定在一对链节上。图4a示出缆索401以这样的方式固定在链节410的通道402内。在图4B所示的另一个变型中,缆索限定件400安装例如压接、硬钎焊、软钎焊、焊接或粘接在缆索端部404上,以防止缆索滑动通过通道402。在另一个变型中,如图4C所示,缆索限定件400锻造形成位于通道402内的斜面,从而在缆索端部404和缆索限定件400之间形成摩擦配合。
图10A和10B示出本发明的一个变型。不同于单独的链节或节段,铰接机构130的节段由被描述成细长线圈的连续的柔性部件形成。线圈的每一圈是铰接机构的一螺旋状节段131。节段131的厚度允许通道105与线圈的轴线平行地从中通过。在近端107的螺旋状节段与在远端109的节段形成分离的对。各对节段通过其自身的一组缆索111连接。间隔元件113还设置在近端107和远端109之间,以将近端节段和远端节段分隔开。缆索可如前文所述固定在螺旋状节段上。
在如图11所示的本发明的另一个变型中,铰接机构132由连续的管115形成,该管具有通过管的整个长度的多个内腔117。连续的管115还可任选地包括中心内腔119。缆索组可在管的长度上延伸并且可通过例如环氧树脂锚定在近端和远端的变化的对应位置,或者缆索组可在一对中的各个节段之间延伸且可锚定在近端和远端的各个节段处或附近。例如,在机构的近端121,一个缆索组可锚定在处A1处,另一个缆索组锚定在B1处,再一个缆索组锚定在C1处。然后各个缆索组可锚定在机构远端123的对应位置例如锚定在位置A2,B2和C2处。
在成对的节段之间延伸的缆索可被精确切割为一定的长度,但是如果希望的话,则可被切割成大约等于该长度。一种放置缆索的方法包括使用推动器使缆索通过内腔前进。推进器上的可视标记或可触摸止动件将指出推动器前进多远。在移开推动器后,可将针引入每个内腔,以从例如管外部的注射器将环氧树脂沉积在各个缆索端部上。在例如可与通过管的整个长度的缆索组一起使用的另一个方法中,针可被引导在希望的缆索连接点或在其附近刺穿管的壁,以在希望的点向缆索输送环氧树脂,从而将各个缆索连接在各对应的节段对上。
尽管许多铰接机构已经在上述附图中示出仅具有8个链节(四对),但是这仅是为了指出各个设备部件相互之间的关系。根据因素例如预期的要用于身体的区域和铰接机构的预期长度,可使用任何数量的链节和链节对。例如,图1F的铰接机构101具有9个链节对。
铰接机构内还可包括间隔链节即没有通过分离的缆索组连接的链节(例如在图1A-1E内的C1和C2)。这些链节可插在位于近端或远端或这两者的活动链节之间,并且用作不可独立地致动但允许缆索组通过以到达相邻的活动链节的被动链节。间隔链节对于使近端或远端具有附加的长度是希望的。另外,在机构的一端包含间隔链节允许对应的另一端的运动或动作被按比例地缩放。例如,在远端包括间隔链节将需要使用者在近端进行更夸大的运动,以在远端实现希望的动作。这在其中希望细致、灵敏控制的运动的情况,例如其中在缺少远端运动或动作的这种按比例缩放时存在使用者不具有执行希望的手术所必需的灵巧性的危险的情况中是有利的。可选择地,间隔链节可设置在远端,在此情况下远端运动的程度可按比例地大于近端的运动程度,这也是特定应用需要的。
应指出,本发明的铰接机构可用于在其自然的、直线构型下,或者在从患者外部的位置在其近端进行各种操作之后,在身体区域内引导外科或诊断器械工具或将其引导到患者身体区域内的目标位置。在合适的插入之后,机构的近端的运动会导致远端进行相应的运动。此外,根据近端相对于远端的转动度数,产生的远端的定向运动可被反向、镜像对称或以其它方式运动。另外,近端提供使用者接口以控制远端的转向和操纵,这与取决于例如滑轮或旋钮来控制转向线的其它传统的转向机构相比方便且易于使用。该使用者接口允许例如使用者基于位于外部的近端使用者接口的被操纵的形状,容易地观看例如位于患者体内的机构远端的形状和定向运动。
由于形成如上所述的通过分离的缆索组连接的多对节段或链节,所以可实现复杂的运动包括向上、向下、向左、向右、倾斜和转动运动。例如,在图1B内所示的变型中,可通过致动在近端的最远的链节A1来致动在远端的最远的链节A2,而所有其它链节保持固定不动。为了说明,最远的链节示出为转动以形成直立圆锥114a,其基部直径随因素例如增加的杆部分的长度、提高的缆索柔性以及除了其它链节之外的另外的间隔链节103(例如C1)而增加。
如图1C所示,通过致动位于近端的最近的链节D1来致动位于远端的最近的链节D2,而所有其它链节保持固定不动。在转动时,由于被致动的节段的数量增加(从而增加倾斜高度),直立圆锥114a的基部直径大于图1B内的圆锥114a。
如果在图1D内在近端的中间链节例如B1被致动而所有其它链节保持平直或相对固定不动,则只有在远端的对应的中间链节B被操纵且转动以形成具有弯曲侧边116a的圆锥。或者,如图1E内所示,可通过操纵最远的链节A1形成具有弯曲侧边116b的较大圆锥,从而所有近端链节弯曲成曲线。在远端的所有链节然后以反向的方向模拟该曲线。
尽管图1B-1E内示出了转动运动,但是其它复杂的、三维运动包括上、下、右、左和倾斜运动也可实现。例如,图1F示出沿其长度具有多个弯曲部(122,124,126)的铰接机构的远端120,每个弯曲部的定向方向彼此不同。应指出,图1F的铰接机构101具有包含三个缆索组的9对链节,从而提供27个自由度的运动,但是链节和缆索组的其它构型可容易地实现类似的复杂运动和几何结构。可通过控制与各链节或节段对对应的缆索组而独立致动各链节或节段对,由此提供机构同时沿不同方向弯曲并形成活动的复杂构型的能力。
当通过缆索组连接时,节段的自然构型通常是直的。因此,如果希望在铰接机构的远端保持一定的弯曲或其它复杂构型,可使在近端节段上滑动的可延展管成形,以保持该近端节段并由此使与该近端节段对应的远端节段保持处于特定构型。当例如医生已将机构引导到预期目标位置并希望将该机构“锁定”在合适位置同时例如致动与该机构相联接的工具、或在单独的手术中接合在一起时,这是有利的。术语“可延展”是指管的柔性足以使其能够成形,但是其刚性足以使其保持其成形的形式。在另一个变型中,可将锁定杆插入延伸通过该链节或节段的一个或多个连接通道以将铰接机构的近端和远端节段“锁定”在合适位置。锁定杆可以是可延展金属杆,其可成形并然后插入链接通道以将该近端和远端节段设定为特定构型,或者锁定杆可以以预成形形式提供。
其它将铰接机构固定或锁定在合适位置的方法包括与拉紧缆索一起使用构造成具有球-凹窝式接头的链节。Corey,Jr.等的美国专利No.5899425内说明了这种系统的示例。在此系统中,通过接头的缆索被拉紧,使得球-凹窝摩擦地锁定在一起。缆索可通过多种方式被拉紧,包括例如通过将拉紧缆索的端部固定在拧在固定于机构近端上的螺母内的螺钉上。图3D和3E示出用于本发明的铰接机构的球-凹窝式链接系统。如图所示,在图3D中,各链节300均具有用于接纳设置在链节之间的球形元件或球302的凹窝301。当沿链节的轴线沿直线施加拉紧力时,链节将由于球和凹窝之间的摩擦力而锁定在合适位置。图3E示出类似构型的链接系统,其中各链节310和球312具有用于拉紧缆索通过的对齐的通道313和314。其它用于在固定的、铰接的位置锁定铰接机构的机构包括但不局限于2004年8月26日提出的美国申请No.10/928479内所述的机构,该申请的全文引用在此作为参考。
铰接机构可用于将外科器械、诊断工具、各种导液管等远程操纵进入中空或分室的器官和/或组织,这些器官和/或组织包括但不局限于血管(包括颅内血管、大血管、末梢血管、冠状动脉、动脉瘤),心脏,食道,胃,肠,膀胱,输尿管,输卵管,输送管例如胆管,以及大的和小的气道内。铰接机构还可用于将外科器械、诊断工具、各种导液管等远程引导进入实心器官或组织,这些器官或组织包括但不局限于皮肤、肌肉、肝脏、肾、脾和良性或恶性瘤。铰接机构可用于哺乳类动物包括人类(哺乳动物包括但不局限于灵长类动物、家畜、善运动的动物、猫、狗、兔子、老鼠)。
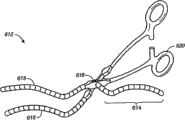
铰接机构通常可用于任何应用,或安装在其中在近端存在使用者接口而在远端存在致动元件的其它设备。使用者接口可包括铰接机构的近端,而远端可连接在致动元件上。例如,在图6A中,示出可远程操纵的外科夹具600。夹钳602连接到铰接机构的远端604上。近端606嵌入夹具手柄608。使用者能够通过操纵铰接机构的近端606来远程定位夹钳602。中间部分(“颈部”)610还具有外科器械,其长度和柔性将根据应用改变,并且颈部实现间隔元件的作用。图6C示出另一个变型,其中外科夹具630的夹具手柄632从近端634延伸出。在其它变型中,夹钳602可与剪刀或其它切割元件、解剖器、组织抓持器或针抓持器、封缝针、烧灼或消融设备或其它类似工具或器械交换。
在另外的变型中,铰接机构本身可形成夹钳。在图6B中,夹具612具有使用者端部,并且近端节段614从夹具的枢轴616延伸出。在近端节段614内开始的缆索分成两条缆索,每条缆索位于枢轴616的区域内,从而在近端的每条缆索可然后在形成相对的夹钳618、618的两个分离的铰接机构内终止。因此,当使用者操纵近端节段614时,夹钳618将保持对齐并相应地被远程操纵。如果希望,则近端节段614可延伸并通过夹钳的一个手柄610被操纵。夹钳还可构造成具有特定的组织接合表面以及消融元件。
在另一个变型中,铰接机构可安装在导液管中并用于例如在困难的中心线布置中或在经皮肤的或影像导引的排泄导管布置中引导导液管。如图7所示,导液管700可包括铰接机构,该机构的近端702构造成与使用者接口--在此实施例中为与手柄706--成一体的部件。远端节段708形成导液管的远端部分,并且可被远程操纵以在导液管700前进时引导该导液管。在另一个变型(未示出)中,铰接机构可与导线一样旋拧通过导液管,从而近端节段从导液管的近端延伸出,或者直接从导液管内腔或者从分叉的Y形连接器延伸出。远端节段可从导液管尖端延伸出,并且导液管在前进时被远程导入其目标位置。通常,铰接机构可然后被取出以允许通过导液管的流动。但是,如果使用的铰接机构具有中心内腔,则不必取出该铰接机构。
铰接机构可以以相同方式安装在并用于使柔性内窥镜转向。在图8内,内窥镜800构造成使得铰接机构的近端806形成与内窥镜手柄804成一体的部分。机构的远端808将构成内窥镜插入管810的全部或一部分。在操纵近端节段806时,插入管810可被远程操纵。
在另一个变型中,如图9A和9B所示,铰接机构可用作手保持或自保持的牵开器900。近端节段902和远端节段904可从牵开器手柄906延伸出。近端节段902的操纵将使远端节段904以相应方式运动。远端节段可被操纵以形成多种复杂形状,希望的形状取决于特定的应用。在操作时,远端可首先被定位成希望的形状并然后与目标组织接合。可选择地,可在操纵远端的同时执行组织牵拉,即远端可与目标组织接合,并通过操纵远端的行为来使组织牵拉。
牵开器通常必须在使用时保持其形状。因此,牵开器可使用例如前文所述的方法“锁定”在合适位置。例如,机构可包括具有球-凹窝式构型的链节以及锁定缆索(未示出)。可选择地,如前文所述,可在操纵近端节段902之前将可延展护套(未示出)放置在近端节段902上,或者可使用锁定杆(未示出)以将牵开器固定为特定构型。在图9A中,牵开器900是“u”形。在图9B中,牵开器900具有三角形牵开面。应指出,牵开器的形状可根据因素例如有关的解剖结构或外科手术的类型改变。
在另一个变型中,多种铰接机构可以组合成使得能够远程模拟使用者手指的运动。例如,机构的近端可例如通过绑在每个指部上或固定在使用者佩戴的手套上而固定在使用者手指上。然后远端将根据使用者手指的运动而运动。如文中使用的,术语“手指”和“指部”可互换,并且是指大拇指、食指、中指、无名指和小拇指。在图9C所示的变型中,机构950包括可通过使用者的大拇指、食指和中指的运动操作的三个铰接机构。可见,近端951、952和953可通过绑带957分别固定在使用者的大拇指、食指和中指上。该机构还通过绑带958固定在使用者的手上,该绑带将间隔元件956的近端固定在使用者的手腕上。使用者大拇指、食指和中指的运动会分别导致远端961、962和963发生对应的运动。这种变型在其中需要组织或器官的一般(肉眼)操纵的多种外科情况中是有利的。在此变型以及其它变型中,保护性可弯曲护套可在机构上延伸,以避免各链节或缆索对组织的可能的损伤。
在另一个变型中,模拟手指运动(在文中通常还被称为手致动设备)并且在设备的近端包括使用者手控接口以便远程固定人的手指的上述铰接机构或铰接机构的组合,可被进一步修改成使得使用者手控接口还被构造成与手掌(前侧面)可取下地接合。接口总体上包括两个部分:用于致动运动并将一个或多个手指可释放地固定到接口的手指部分,以及部分紧靠手掌并提供另一个用于可释放地固定使用者的手和手指的表面的手柄部分。此设备构型的人体工程学是尤其希望的,因为使用者的手可快速接合和脱离设备。在例如其中医生通常需要快速更换工具的外科设备中,手能够快速和容易地接合或脱离设备是尤其有利的。重要的是,尽管该设备通常适合于通过手使用,并且通常包括三个机构以容纳手的食指、中指和大拇指,但是可包括的铰接机构的数量并没有这样限制,并且可包括数量多达使用者可一次控制的机构。
手致动设备的远端通常包括受动器部分,该受动器部分总体上模拟手指的结构和运动并且其通过位于接口的手指部分的相应运动而远程致动。受动器部分通常构造成不仅可提供一般的运动例如抓紧和夹紧,而且还可提供例如小组织操纵常常需要的较精细的手指运动。因此,在外科应用中,受动器可用于夹紧、提供牵引、解剖、清除或其它对身体组织的操纵。
在解剖学上,人的手指包括被称为指骨的骨头。食指、中指、无名指和小拇指具有三个指骨,它们通常被称为近节指骨、中节指骨、远节指骨。大拇指仅包括两个指骨,近节指骨和远节指骨。指骨的运动由将一个指骨的头部与较远的指骨的基部接合的手指关节控制。在近节指骨的基部处的关节(连接近节指骨和手的骨头)是通常允许近节指骨弯曲、延伸、外展、内收和环行(在2自由度空间内运动)的掌指骨(MCP)关节。另一方面,使远节指骨接合到中间指骨和/或使中间指骨接合到近节指骨的指节间(IP)关节通常是单轴屈戌关节,其仅允许弯曲和延伸(在单自由度内的运动)
本发明的手致动设备通常由这样的链节构成,该链接件适于总体上对应于人手指的解剖结构并基本类似于人手指关节的运动范围,但是还可构造成在任何希望的自由度内提供关节屈伸。例如,链节可制成一定的尺寸并且可集合在一起,以便它们的外观和工作类似于人手指和手指关节。这样,适于对应于指骨的链节将例如长于用作手指关节(MCP和IP关节)的一部分的链节。包括对应于人手指的总体解剖结构并且包括通常类似于人手指关节作用的部件的设备将基本上提供大部分通常与人手相关联的手工技巧。
代表指骨的链节可以具有任何尺寸,只要它们能够与人指骨类似地起作用,但是通常如上所述长于其它链节,并且将因此在文中被称为“细长链节”。细长链节的长度可在从小于1毫米到数厘米的范围内,并且在一些非医学应用中甚至为数英寸。对于普通外科使用,对应于近节指骨的细长链节的长度可为大约22mm,对于中节指骨为大约17mm,而对于远节指骨为大约15mm。在设备近端的细长链节通常被称为“手指链节”,而在设备远端的那些细长链节被称为“受动器链节”。
细长链节可具有可提供类似于人指骨的功能的任何形式。例如,如果希望的话,细长链节可以是柔性的。细长链节的直径还可根据因素例如与链节相关联的手指(例如大拇指、食指或中指)和设备应用改变,但是通常可在从大约1mm到大约20mm的范围内,或者大于20mm。较小细长链节的直径可为大约1mm到大约3mm,对于中等范围的细长链节为大约3mm到大约7mm,对于较大的细长链节为大约7mm到大约10mm或更大。
细长链节可用任何生物相容的材料如上文提到的用于链节的材料制成,该材料包括但不局限于:不锈钢;钛;钽以及任何它们的合金;和聚合物例如丙烯腈-丁二烯-苯乙烯(ABS)三元共聚物、 聚甲醛均聚物和共聚物,聚碳酸酯,聚乙烯或其共聚物,聚对苯二甲酸乙二醇酯或其共聚物,尼龙,硅树脂,聚亚安酯,含氟聚合物,聚氯乙烯;以及其组合,或本领域内已知的任何合适的材料。如本领域的技术人员显而易见的,细长链节还可以具有各种纹理以提高它们的抓持或牵开能力。细长链节本身可形成纹理,或者可在细长链节上施加带纹理的材料。在一些变型中,如US 6821284内所述,带纹理的材料可包括牵开表面,该专利的全文引用在此作为参考。
聚甲醛均聚物和共聚物,聚碳酸酯,聚乙烯或其共聚物,聚对苯二甲酸乙二醇酯或其共聚物,尼龙,硅树脂,聚亚安酯,含氟聚合物,聚氯乙烯;以及其组合,或本领域内已知的任何合适的材料。如本领域的技术人员显而易见的,细长链节还可以具有各种纹理以提高它们的抓持或牵开能力。细长链节本身可形成纹理,或者可在细长链节上施加带纹理的材料。在一些变型中,如US 6821284内所述,带纹理的材料可包括牵开表面,该专利的全文引用在此作为参考。
如前文所述,指骨通过人手指关节即DIP、PIP和MCP关节相互接合。类似地,在机构内细长链节通过接头连接。文中使用的“接头”是指能够具有DIP、PIP或MCP关节的运动范围的分离链节或链节的分离组合。在机构的近端,对应于MCP关节的接头将通常被称为“基部接头”,而对应于DIP和PIP关节的接头通常被称为“手指接头”。在机构的远端,对应于MCP关节的接头将通常被称为“受动基部接头”,而对应于DIP和PIP关节的接头通常被称为“受动接头”。接头可用类似于如前文所述的用于细长链节的材料的任何生物相容的材料制成。
手致动设备可用多个单独连接的细长链节和接头或相互成一体地形成的细长链节和接头形成。此外,用作细长链节或接头的链节和链节组合包括文中所述的那些链节和链节组合,以及其它合适的链节和链节组合,这些链节和链节组合包括但不局限于2004年8月26提出的美国申请No.10/928479,2004年9月24提出的美国申请No.10/948911以及2004年11月23提出的名称为“Articulating Mechanisms and Link Systems With theTorque Transmission in Remote Manipulation of Instruments and Tools”的美国申请内所公开的那些链节和链节组合,这些申请的全文引用在此作为参考。设计成用于缆索偏压调节的链节也是有用的,该链节包括美国申请No.10/928479和No.10/948911内所述的那些链节。如美国申请No.10/928479和No.10/948911内所述,为了提高铰接机构和手致动设备在被操纵时的刚性,活动链节通常被完全约束以便阻止由于横向施加的力导致的运动。使用被完全约束的链节可在使用时帮助保持在被操纵机构的近端或远端形成的预期形状的完整性,并允许力横跨该预期形状分布。另一方面,间隔链节通常没有被约束。设置间隔链节可在包含这种间隔链节或柔性节段的区域内减小近端或远端的刚性,这在例如当操纵通过或围绕敏感的或脆弱的解剖结构时是有用的。
如前文所述的,本发明的铰接机构在机构的近端和远端包含链节。近端和远端链节形成分离的对,并且通过缆索组相互连接从而一对中的一个链节的运动会导致该对中的另一链节进行对应的运动。同样,本发明的手致动设备包括具有形成成对的分离部件的多个细长链节的铰接机构。细长链节形成近端或“手指部分”和远端或“受动部分”,并且每对中的一个细长链节可位于手指部分的端部,而另一个细长链节位于受动部分端部。缆索组穿过接头并使成对的分离的细长链节相互连接,从而一对中的一个链节的运动会导致该对中的另一链节进行对应的运动,该运动独立于其它成对细长链节的运动。
细长链节的运动的一对一的对应关系还可推广到接头。如下文所述,受动接头的铰接通常可通过在设备近端的基部接头和手指接头的铰接实现,或者通过手指滑动的致动实现。在一些应用中,希望按比例地缩放受动器链节和接头的运动,以相对于在近端的相应运动增加或减小在远端产生的运动,下文给出了其示例。如前文所述,铰接机构内的运动的按比例缩放通常可通过包含另外的间隔链节完成。如未决且共同拥有的美国申请No.10/948911内所述,铰接机构内的运动的按比例缩放通常还可通过增加或减小机构近端或远端的链节内的缆索通道图案半径来实现,该申请的全文引用在此作为参考。例如,如果缆索距近端的链节的中心轴线的距离大于在远端的距离,则远端的弯曲或折曲程度将按比例地大于近端。结果是在近端的较小程度的运动将在远端产生较大程度的运动。可选择地,如果近端的链节的缆索径向距离小于远端的链节的缆索径向距离,则远端的弯曲或折曲程度将按比例地小于近端,从而近端的运动将相对于远端扩大。运动的按比例缩放将还通常产生力的按比例缩放。
图14-17示出手致动设备的一个变型,其中受动接头的铰接将通常通过设备近端的基部接头和手指接头的铰接实现。在图14中,手致动设备1700具有近端1711和远端1721。在近端1711的使用者接口1713包括手指部分1712和手柄部分1717。手指部分1712使远端1701运动并将一个或多个手指可释放地固定在接口1713上。手柄部分1717部分地紧靠手掌并提供另一个用于可释放地固定使用者的手和手指的表面。通常,使用者的大拇指、食指和中指将可释放地固定在手指部分1712上,但是手指的任何组合可被可释放地固定。在图14中,手指部分1712适于将使用者的食指、中指和大拇指分别可释放地固定在食指部分1714、中指部分1715和大拇指部分1716内。
在一个变型中,如图15所示,使用者的手指通过指环1709可释放地固定或接合到手指部分1712。特别地,使用者的食指、中指和大拇指分别可释放地固定在食指部分1714、中指部分1715和大拇指部分1716内。
图16内示出食指部分的放大视图。指环1709可用与上文所述的细长链节相同的材料制成,并且通过本领域内已知的技术例如但不局限于例如使用机械紧固件固定、焊接和粘接连接到手指链节1707A、1707B和1707C。手指链节1707A和1707B之间的延伸部是远端手指接头1708A,该接头构造成具有类似于DIP关节的运动范围。手指链节1707B和1707C之间的延伸部是另一个远端手指接头1708B,该接头构造成具有类似于PIP关节的运动范围。手指链节1707C通过近端基部接头1708C联接到手柄部分1717,该近端基部接头构造成具有类似于MCP关节的运动范围。下文将进一步说明接头的具体结构。
该变型以及其它变型的手致动机构还包括用于远程操纵例如器械、工具或身体组织的受动器部分。在如图17所示的一个变型中,受动器部分1701示出包括三个受动器,1702、1703和1704,但是如果希望的话,该设备可具有多于或少于三个受动器。类似于手指部分,受动器还包括细长链节和接头。受动器部分内的细长链节和接头通常被分别称为“受动器链节”和“受动器接头”,并且还适合于模拟人手指/手的运动。受动器链节通常对应于指骨,并且受动器接头的运动范围通常类似于DIP、PIP或MCP关节。例如,在图17中,受动器链节1705A、1705B和1705C构造成分别对应于远节指骨、中节指骨和远节指骨,而受动器接头1706A、1706B和1706C适于分别类似于DIP、PIP和MCP关节的作用或运动范围。
在操作时,如图15和17所示,由于使用者的手指可释放地固定在还连接到手指链节1707A、1707B和1707C的指环1709上,所以使用者手指例如食指、中指和大拇指从打开位置(图15)到闭合、抓持位置(图17)的运动使手指链节1707A、1707B和1707C和手指接头1708A、1708B以及受动器基部接头1708C进行相应的运动。通过使用者手指的运动,延伸穿过手指链节1707A、1707B和1707C、手指接头1708A和1708B、受动器基部接头1708C、手柄部分1717、轴1710、和受动器掌部1711的缆索(未示出)被致动,从而使受动器部分1701产生相应的运动。特别地,手指接头1708A的运动可导致受动器接头1706A的相应的铰接,手指接头1708B的运动可导致受动器接头1706B的相应的铰接,而手指接头1708C的运动可导致受动器接头1706C的相应的铰接。在受动器部分1701的镜像运动通常可通过使缆索在通过手柄部分1717、轴1710或受动器掌部1711时转动大约180°实现。镜像运动可更直觉或者是一些情况所希望的,因为其允许受动器部分例如在使用者的手指闭合时关闭,或者当使用者的手指向右运动时向右运动,或者当使用者的手指向左运动时向左运动。可选择地,反向运动通常可通过不转动缆索实现。在一些情况下,希望在受动器部分实现镜像运动和反向运动的组合。
尽管在图14、15和17以及其它附图中在使用者接口内仅示出大拇指、食指和中指,但是本发明并未被这样限制。根据因素例如预期使用或使用者优选,该接口可构造成包括用于可释放地固定任意数量的手指的手指部分。另外,手指部分可如图14-17所示地设置在手柄部分上,但是还可改变以适应其它设置和位置,只要可实现受动器部分的足够的致动就行。
图18-20示出手致动设备的另一个变型,其中受动器接头的铰接通常可通过手指滑动装置的致动实现。在此变型中,如图18所示,手致动设备1800具有近端1801和远端1821。近端1801的使用者接口1803包括手指部分1804和手柄部分1805。手指部分1804包括用于导致远端1821运动并将一个或多个手指可释放地固定在接口1803上的手指滑动装置1806。手柄部分1805部分靠接手掌并提供另一个用于可释放地固定使用者的手和手指的表面。
远端部分1802包括具有受动器1808、1809和1810的受动器部分1807。受动器由前文所述的受动器链节和受动器接头构成。例如,在图18内,受动器1808包括受动器链节1811A、1811B和1811C,以及受动器接头1812A、1812B和1812C。具体地,受动器接头1812A的作用类似于DIP关节,受动器接头1812B的作用类似于PIP关节,而受动器接头1812C的作用类似于MCP关节。
除了基部接头1813之外,此变型的使用者接口1803包括手指滑动装置1806以使受动器1808、1809和1810运动。在此以及其它变型中,基部接头1813的运动类似于MCP关节的运动,并且能够弯曲、延伸、外展和环行。
在操作中,如图19和20所示,使用者手指例如食指、中指和大拇指从(图19)打开位置到闭合、抓持位置(图20)的运动致动手指滑动装置1806。使用食指作为示例,如下文所述,食指滑动装置1806的致动相应地使受动器接头1812A、1812B铰接。基部接头1813的铰接相应地以与针对手指环变型内的基部接头说明的方式相同的方式使受动器部分1807内的受动器基部接头1812C铰接。使用者手指的运动使从手指滑动装置1806和基部接头1813延伸穿过手柄部分1805、轴1815和受动器掌部1816的缆索(未示出)致动,从而使受动器部分1807进行对应的运动。受动器部分1807的镜像运动通常可通过使缆索在通过手柄部分1805、轴1815和受动器掌部1816时转动大约180°实现。根据环境要求,轴可具有变化的长度并且可以是刚性或柔性的。
如上文所简述,手指部分在接口的手柄部分上的设置可改变,以提高人机工程学,或者取决于因素例如使用者优选或包含的手术的类型。例如,如图21所示,大拇指滑动装置2101在与如图14-20内所示的位置不同的位置与手柄部分2102配合。在特定的人机工程构型中,如图21所示,大拇指滑动装置2101的位置低于食指滑动装置2103和中指滑动装置2104的位置,并且在一些情况下还在这些滑动装置后面。
手指滑动装置的总体构型可根据许多与使用者相关联的因素例如人机工程和使用者优选改变,但是通常构造成包括保持器、滑动件、传动杆和滑轮杆,从而保持器产生的平移运动使滑轮杆产生转动,而滑轮杆的转动又使连接缆索运动,从而致动受动器接头和链节。
在图22所示的变型中,手指滑动装置2200包括壳体2201、沿壳体2201的轨道2202、保持器2203、传动杆2204、滑轮杆2205和滑动件2206。滑动件2206通过穿过滑动件2206和轨道2203安置的销钉2211联接到壳体2201,以防止滑动件2206相对于壳体2201转动。保持器2203在可枢转铰链2207处联接到滑动件2206,该铰链适应手指弯曲和伸展。指部的端部可放置在保持器2203内,并且在PIP和DIP关节弯曲或伸展时,保持器2203的运动可导致滑动件2206沿轨道2202平移。如下文所述,该滑动运动将传动杆2204的平移转变成滑轮杆2205的转动,从而拉动连接到滑轮杆2205的缆索(未示出),以使受动器部分运动。图27内所示的保持器2203具有用于可取下地固定使用者指尖的顶板2208和底板2209。但是,本发明的保持器构型不仅包括图27内所示的结构,而且还想到环型结构2310(图23),或者任何适合于可取下地固定使用者的指尖以便致动设备的构型。在此以及其它变型中,基部接头2210从壳体2201延伸出,并且可刚性固定在壳体2201上或与其成一体地形成。如前文所述,接头例如基部接头2210构造成与至少以两个自由度运动的MCP接头类似地起作用。手指滑动装置的致动对应于DIP和PIP接头的铰接,这些接头通常已知为在单自由度内运动。
图23和24中以及在图18-21中示出手指滑动装置的另一变型。在该变型中,手指滑动装置1806包括具有滑动销2302的壳体2301、传动杆2304、滑轮杆2307、保持器2310、以及滑轮(未示出)。设置弯曲的滑动件2303特别符合人机工程学,因为在操纵中,当PIP和DIP接头弯曲时,手指滑动装置的整个动作模拟使用者指尖经过的弯曲路径。此外,使用该弯曲的滑动路径能更精确地模拟人手指的运动,因为利用该构型,使用者的DIP和PIP接头能够铰接而不用移动MCP接头。例如,参见图20,受动器接头1812A和1812B的致动能够独立于受到器基部接头1812C的致动而容易地发生。为实现上述动作,滑动件2303的弯曲部分可以适应于圆弧、椭圆、抛物线等。
对于手指滑动装置1806的其它特征,滑动销2302插入轨道2308以使弯曲的滑动件2303连接到壳体2301。滑轮杆2307通过第一销钉2309可枢转地连接到壳体2301。具有近端2305和远端2306的传动杆2304可操作地使滑轮杆2307连接到保持器2310。第二销钉2311使传动杆近端2305联接到滑轮杆2307。在远端2306,传动杆2304通过第三销钉(未示出)可枢转地连接到弯曲滑动件2303。在图23中,还示出刚性固定在壳体2301上的基部接头1813。
在图24中,更清楚地示出另外的手指滑动装置所元件相互之间的关系。如图24所示,手指滑动装置1806包括具有远端2313的弯曲的滑动件2303。远端2313固定地连接到托架2314。板2315具有接纳心轴2317的柱状开口2316,从而板2315可围绕心轴2317转动。心轴2317通过销钉2318可枢转地联接到托架2314。板2315因此可相对于托架2314枢转和转动,即其可围绕销钉2318枢转以及相对于心轴2317转动。保持器2310固定在板2315上,并因此可相对于托架2314枢转和转动。该手指滑动装置构型尤其符合人体工程学,因为其在手指外展时适应自然手指运动。手指保持器能够相对于该滑动装置转动是尤其有利的,因为其可在手指尖彼此相对地稍微自然转动期间容易地适应手指之间的组合弯曲和外展运动。
图23的手指滑动装置还包括如在图25内沿线B-B的横截面和图26内所示的用于导致受动器部分运动的缆索。缆索2503和2504围绕滑轮2317缠绕并在滑轮杆2307终止。缆索2501和2502在滑轮杆2307的相对侧围绕滑轮2318缠绕,并同样在滑轮杆2307处终止。在操作时,使用者手指例如固定在手指滑动装置上的食指在DIP和PIP关节处的弯曲或伸展可导致滑轮杆2307进行转动运动,这从而围绕滑轮2318自由地拉动缆索2501和2502,并围绕滑轮2317自由拉动缆索2503和2504。更具体地,当使用者的食指在DIP和PIP关节处弯曲时,缆索2501被围绕滑轮2318拉动而缆索2503被围绕滑轮2317拉动。当使用者食指在DIP和PIP关节处伸展时,缆索2502被围绕滑轮2318拉动而缆索2504被围绕滑轮2317拉动。然后,如下文所述,缆索2501、2502、2503和2504穿过基部接头1813内的通道2604,以铰接受动器接头(例如图30内的接头1812A和1812B)运动。
滑轮可构造成围绕销钉2039转动或者可固定地连接到滑轮杆2307,并且滑轮通常具有相互不同的直径。
在一些情况中,希望相对于在使用者接口进行的运动按比例地缩放受动器的运动。通常,滑轮直径被选择为使得对于给定转动,拉动的缆索量等于如果用铰接链节代替滑轮可拉动的缆索的量。因此,因为致动最远端受动器链节(例如图20内的1811A)的缆索通常比致动另一个远端受动器链节(例如图20内的1811B)的缆索行进得远,所以控制最远端的受动器链节的滑轮的直径必须大于控制远端受动器链节的滑轮的直径。例如,在图25内,滑轮2318示出为其直径大约为滑轮2317的两倍。受动器的运动的按比例缩放还可通过在保持滑轮直径相互之间的比率相同的同时改变滑轮直径和/或改变滑轮直径相互之间的比率来调节。另外,尽管图25-26内的滑轮是圆形的,但是可使用其它滑轮形状来调节受动器接头的运动。例如,可使用凸轮形状来以非线性方式致动受动器接头。
参照图26,另一种按比例缩放受动器的运动的方式是通过将传动杆2305的远端提高成更接近滑轮2307以便销钉2323插入一个销钉孔2317,来沿滑轮杆2307的长度调节传动杆2304的位置。当远端2305更接近滑轮2505时,受动器的运动按比例缩小。如前文所述,其它按比例缩放受动器的方式包括但不局限于包含另外的间隔链节和/或改变链节内的缆索通道图案半径。在一些情况例如在工业应用中,希望反向按比例缩放。
使用者的手指使基部接头1813运动。如前文所述,基部接头1813的运动导致受动器基部接头(例如图20内的1812C)发生相应的运动。用于使基部接头1813连接到受动器基部接头的缆索、缆索2601、2602和2603终止于图26所示的基部接头2813上。下文将进一步说明受动器部分上的缆索末端。
离开使用者接口的手指部分的所有缆索在受动器链节处终止之前通过手柄部分、轴和受动器掌部。如上所述,为了在设备的远端镜像运动,离开近端的缆索在远端终止之前通常转动大约180°。但是,在一些应用中,由于希望镜像和反向运动的组合,则不必转动所有缆索。另外,在单自由度接头例如对应于DIP和PIP关节的接头中,为了提供镜像运动,缆索不必转动180°。缆索仅需运动到枢轴的另一侧,或者相对于该对中另一链节的缆索位置铰连在该对中一个链节上。
图27通过记下缆索在手柄部分1805内的进入点和离开点而示出穿过手柄部分1805的缆索转动。在图27中,进入手柄部分1805的缆索处于在第一区域2703所示的总体图案。例如,缆索2602示出在大约2点钟位置进入第一区域2703,而缆索2603在5点钟位置进入该区域。在离开第二区域2702时,可看到不同的缆索图案。缆索2602可在大约8点钟位置而不是在2点钟位置处离开,而缆索2603可在大约11点钟位置而不是5点钟位置离开。只有需要镜像运动时才需要转动180°。否则,缆索可以以任何方式转动以适应设备的预期使用。
使用者手控接口的手柄部分2802可以是如图28所示的模制手柄,该手柄具有用于规定缆索的路线的通道或管2801。在此变型中,通道可转动或交叉以实现镜像或反向运动,而不是转动缆索。在如图29所示的另一个变型中,手柄部分2901可以是空心的,并包括用于对齐和确定缆索2903的路线的滑轮2902。在此变型中,缆索2903可在到达滑轮2902之前或者在绕过滑轮2902之后转动(交叉)。本发明的可用于制造模制或空心手柄的材料包括前文所述的用于细长链节的那些材料,以及适合于制造医疗器械的其它材料。
该设备的受动器部分通常包括对应于使用者的食指、中指和大拇指的三个受动器,但是可包含任意数量的受动器。如通常所述,从使用者接口前进的缆索在受动器链节处以不同的方式终止,以使受动器运动。可通过结合图18-20查看图30所示的缆索终止位置,而更好地理解使用手指滑动装置的接头铰接。图30内所示的受动器部分代表图18-20内的受动器部分1807。尽管已说明了附图内的受动器的总体结构和操作,但是应理解,此结构和操作还可应用于具有指环的接口变型。
在图30中,受动器1808对应于使用者食指,并总体上构造成包含受动器基部接头1812C,两个受动器接头1812A和1812B,以及受动器链节1811A、1811B和1811C。受动器链节1811C对应于食指的近节指骨;受动器链节1811B对应于食指的中节指骨;而受动器链节1811A对应于食指的远节指骨。类似地,受动器基部接头1812C对应于能够以至少两个自由度运动的MCP关节,受动器接头1812B对应于能够以单自由度运动的PIP关节,而受动器接头1812A对应于能够以单自由度运动的DIP关节。如图34所示,代表性的受动器链节1811B通过将链节3101固定在管上形成,但是其它形成受动器链节的方法也是显而易见的。
离开设备的手柄部分的缆索被接纳穿过轴(未示出),并且被受动器掌部1816按一定路线输送到合适的受动器。如图30以及其它附图所示,从受动器掌部1816引出的受动器从轴延伸出。但是,如果希望的话,受动器可适合于从沿轴或受动器掌部1816的不同位置出现以形成例如交错的或更加分散的受动器构型。这样,可制成或多或少与手相似的受动器部分。通常,来自滑动件并使受动器接头1812A和1812B运动的缆索2501、2502、2503和2504在两个受动器链节1811A和1811B之一处终止。例如,如图31内更清楚地示出的,围绕较大滑轮拉动并使受动器接头1812A运动的缆索2501和2502在最远处的受动器链节1811A处终止。如图31B所示,被围绕较小的滑轮拉动且使受动器接头1812A运动的缆索2503和2504在受动器链节1811B处终止。同样,如图31C所示,源自基部接头(图20内的1904)并且使受动器基部接头1812C运动的缆索2601、2602和2603总体上在受动器链节1811C处终止。
受动器接头1812A-1812C通常构造成分别具有模拟MCP、PIP和DIP关节的运动范围的运动范围。例如,对应于MCP关节的受动器基部接头1812C通常装备成通过包括例如两个或多个链节3105而在至少两个自由度内运动,其中各链节3105具有从链节的一个表面的直径伸出的肋部3106,并具有延伸越过链接件的(与所述一个表面)相对的表面的通道3104。通道3104适合于沿通道的整个长度可枢转地接合肋部3106,从而两个链节可围绕通道的轴线彼此相对地枢转。在受动器基部接头1812C中,两个链节定位成使它们各自的肋部相互垂直地定向,并且最近端的链节的肋部接合受动器掌部1816内设置的类似的通道,以便提供两自由度的运动。远端受动器接头1812A和1812B通常仅需要单自由度内的运动。图33示出图30和31C内也示出的接头结构。图31A-31B和图32内示出另一个提供单自由度的代表性接头,并且该接头包括具有肋部3102的链节3101,该肋部从链节的一个表面延伸出并且具有在延伸的肋部的相对侧上与其对齐的通道3103。通道3103适合于沿通道的整个长度可枢转地接合肋部3102,从而两个链节可围绕通道的轴线彼此相对地枢转以提供单自由度。
重要的是,上述接口的手指部分可构造成包括用于铰接受动器接头的手指滑动装置和手指环的组合。例如,由于大拇指关节通常可以(与其它指头)彼此稍微独立地运动,所以手指环类型的手指部分可更准确地模拟在受动器处人大拇指关节的运动。这是因为与仅允许对远端受动器链节的运动进行耦合控制的手指滑动装置相比,手指环输入控制允许对远端受动器链节的运动进行独立控制。另一方面,当手指例如食指、中指和无名指的DIP和PIP关节被致动时,它们通常一起弯曲或伸展。因此,手指滑动装置更适合于使这些手指的受动器运动。
还应理解,手致动设备还可采用与人手不同的构型。例如,在一些外科应用中,希望受动器部分的形状形成为使得其成为一工具,该工具的功能性与手紧握的功能性不同。
在另一个变型中,铰接机构可用于心房纤维性颤动的内窥镜治疗。具体地,本发明的铰接机构适合于有助于在心脏组织内产生烧蚀损伤,如例如Cox J.L.(2000)“Minimally Invasive Maze-III Procedure”,OperativeTechniques in Thoracic and Cardiovascular Surgery Vol.5(1):79-92;Simha等(2001),“The Electrocautery Maze-How I Do it”,The Heart SurgeyForum Vol.4(4):340-345;以及Prasad等(2001)“Epicardial Ablationon the Beating Heart;Progress Towards an Off-Pump Maze Procedure”,The Heart Surgery Forum Vol.5(2):100-104;以及如Cox等的美国专利No.6161543内所述,这种烧蚀损伤被证明在治疗心房纤维性颤动时是有效的。这些手术包括心外膜或心内膜消融,并且许多这种过程需要到达患者心脏的后面,这是困难的。本发明的铰接机构可具有烧蚀元件,并且其能够形成复杂的几何结构;该结构可被容易地操纵通过心脏周围的解剖结构并容易地定位在心脏后面的不同位置以有助于这种消融治疗。
图12A内所示的铰接机构包括连接到电磁能源(未示出)例如生成射频(RF)或微波频率范围内的能量的烧蚀元件125。这种烧蚀元件是本领域内公知的,包括US 6471696内所述的那些元件。烧蚀元件通过连接部件134安装在机构的远端141上的链节上,该连接部件与链节142的通道144适合地接合。烧蚀元件包括通常由热塑弹性体形成的绝热部分127,并且纵向延伸天线或线129,以将能量传送给(该烧蚀元件)设置在其中的组织。包括螺旋线圈、印刷电路等的其它天线或线的几何结构等同地起作用。绝缘传导引线136和137设置用于在单极构型内使能源与天线或线连接。还可设想双极构型。还可设置与烧蚀元件连接的附加连接器138和139,如例如美国申请公报No.US 2003/0078644(Phan)所述,这些连接器可起多种作用,例如提供温度或其它传感器或探针,或者向元件榆送冷却介质以冷却周围组织并防止大范围的组织损伤。
图12B示出构造用于消融的本发明铰接机构的另一个变型。在此变型中,构造用于双极应用的铰接机构133包括具有远端链节152的远端143,该链节包含相对的电极159。相对的电极被通道164分隔开。绝缘导线例如导线166和167使每对电极连接到能源(未示出)。当被提供能量时,越过电极对传输能量,从而在周围组织内产生烧蚀损伤。另外,还提供附加连接件168和169,以提供另外的功能包括探针、传感器和冷却流体。
尽管上述变型使用依赖于电磁能量的烧蚀元件,但是根据本发明的铰接机构还可被容易地改变以结合本领域内已知的其它消融方法。例如,烧蚀元件可以是低温或超声波探针,或者使用激光能量的烧蚀元件,或其它已知的烧蚀技术。
可形成如图13A-13F内所示的示例中所示的心外膜烧蚀损伤。可首先通过例如胸廓切开术、小型胸廓切开术或放置在患者前部胸壁内的套管针端口(例如5-10mm端口),借助于铰接结构到达患者心脏929的后面。铰接机构的间隔元件(未示出)可在端口处起支点的用途。当医生弯曲位于患者外部的近端链节时,在患者体内的远端链节相对地模拟外部链节的弯曲部,以便在铰接机构前进时环绕上腔静脉933(13A)并继续围绕肺静脉935(13B)。一旦处于如图13B所示的合适位置,则然后可致动位于铰接机构远端上的烧蚀元件以形成损伤,如在此具体示出的肺部环形损伤943(图13C)。在图13D和13E内,铰接机构示出为被重新定位成从肺静脉935向下延伸,以在僧帽瓣环下面形成连接到前面形成的肺部环形损伤943的损伤939(图13F)。
本发明还可想到提供多种铰接机构和相关联附件的成套工具。例如,可提供包含具有不同长度、不同节段直径和/或不同类型的外科器械或不同类型的锁定杆或可延展覆盖物的铰接机构的成套工具。该成套工具可针对特定手术例如内窥镜、牵开或导液管放置和/或特定患者人群例如儿童或成人而定制。
文中引用的所有公告、专利和专利申请的全文引用在此作为参考,这在作用上与具体和单个地指明引用各个单个的公告、专利或专利申请作为参考相同。尽管为了清楚地理解而较详细地说明了作为例证和示例的上述发明,但是本领域普通技术人员根据本发明的教导可容易地看到,可对本发明进行某些改变和修改而不会脱离所附权利要求的精神和范围。
Claims (8)
1.一种用于对目标进行远程操纵的手致动设备,该设备包括:
a)近端,该近端具有包括手指滑动装置的使用者手控接口部分,该使用者手控接口构造成可取下地固定人手的用于运动的一个或多个指部,从而当所述指部被固定在手指滑动装置上时,所述指部的折曲被转变成手指滑动装置的平移运动;以及
b)具有受动器部分的远端,其中,手指滑动装置的平移运动被转变成所述受动器部分处的弯曲运动,
所述手指滑动装置包括:
a)传动杆;
b)连接到传动杆的滑轮杆;
c)连接到滑轮杆的多个滑轮;以及
d)至少两组缆索,每组缆索在一端连接到滑轮或滑轮杆并且在另一端可操作地连接到受动器部分;
其中,传动杆的平移运动产生滑轮杆的转动运动,该转动运动致动围绕滑轮的缆索,以使受动器部分弯曲。
2.根据权利要求1的手致动设备,其特征在于,所述受动器部分包括近端接头以及一个或多个远端接头。
3.根据权利要求2的手致动设备,其特征在于,所述手指滑动装置控制所述一个或多个远端接头的运动。
4.根据权利要求2的手致动设备,其特征在于,近端接头的控制独立于一个或多个远端接头的控制。
5.根据权利要求2的手致动设备,其特征在于,手指滑动装置通过具有MCP关节的运动范围的基部接头联接到使用者手控接口。
6.根据权利要求5的手致动设备,其特征在于,所述基部接头的运动使所述近端接头发生对应的相关运动。
7.根据权利要求1的手致动设备,其特征在于,该设备还包括用于将受动器部分锁定在固定位置的锁定机构。
8.根据权利要求1的手致动设备,其特征在于,手指滑动装置的平移运动被按比例地缩放成受动器部分的弯曲运动。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/997,249 US7410483B2 (en) | 2003-05-23 | 2004-11-24 | Hand-actuated device for remote manipulation of a grasping tool |
| US10/997,249 | 2004-11-24 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101106951A CN101106951A (zh) | 2008-01-16 |
| CN100588375C true CN100588375C (zh) | 2010-02-10 |
Family
ID=35539556
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN200580047088A Active CN100588375C (zh) | 2004-11-24 | 2005-09-19 | 用于远程操纵抓持工具的手致动设备 |
Country Status (7)
| Country | Link |
|---|---|
| US (10) | US7410483B2 (zh) |
| EP (3) | EP1833398B1 (zh) |
| JP (3) | JP5188811B2 (zh) |
| CN (1) | CN100588375C (zh) |
| AU (1) | AU2005309974B2 (zh) |
| CA (2) | CA2850651C (zh) |
| WO (1) | WO2006057702A2 (zh) |
Families Citing this family (793)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040199052A1 (en) | 2003-04-01 | 2004-10-07 | Scimed Life Systems, Inc. | Endoscopic imaging system |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US7410483B2 (en) | 2003-05-23 | 2008-08-12 | Novare Surgical Systems, Inc. | Hand-actuated device for remote manipulation of a grasping tool |
| US7090637B2 (en) * | 2003-05-23 | 2006-08-15 | Novare Surgical Systems, Inc. | Articulating mechanism for remote manipulation of a surgical or diagnostic tool |
| US8100824B2 (en) | 2003-05-23 | 2012-01-24 | Intuitive Surgical Operations, Inc. | Tool with articulation lock |
| US8562640B2 (en) * | 2007-04-16 | 2013-10-22 | Intuitive Surgical Operations, Inc. | Tool with multi-state ratcheted end effector |
| US8182417B2 (en) * | 2004-11-24 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Articulating mechanism components and system for easy assembly and disassembly |
| US7147650B2 (en) * | 2003-10-30 | 2006-12-12 | Woojin Lee | Surgical instrument |
| US7842028B2 (en) * | 2005-04-14 | 2010-11-30 | Cambridge Endoscopic Devices, Inc. | Surgical instrument guide device |
| US7338513B2 (en) | 2003-10-30 | 2008-03-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7686826B2 (en) * | 2003-10-30 | 2010-03-30 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7678117B2 (en) | 2004-06-07 | 2010-03-16 | Novare Surgical Systems, Inc. | Articulating mechanism with flex-hinged links |
| US7828808B2 (en) * | 2004-06-07 | 2010-11-09 | Novare Surgical Systems, Inc. | Link systems and articulation mechanisms for remote manipulation of surgical or diagnostic tools |
| US8215531B2 (en) | 2004-07-28 | 2012-07-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a medical substance dispenser |
| US11890012B2 (en) | 2004-07-28 | 2024-02-06 | Cilag Gmbh International | Staple cartridge comprising cartridge body and attached support |
| US7785252B2 (en) * | 2004-11-23 | 2010-08-31 | Novare Surgical Systems, Inc. | Articulating sheath for flexible instruments |
| US9700334B2 (en) * | 2004-11-23 | 2017-07-11 | Intuitive Surgical Operations, Inc. | Articulating mechanisms and link systems with torque transmission in remote manipulation of instruments and tools |
| US20060201130A1 (en) * | 2005-01-31 | 2006-09-14 | Danitz David J | Articulating mechanisms with joint assembly and manual handle for remote manipulation of instruments and tools |
| US8696662B2 (en) | 2005-05-12 | 2014-04-15 | Aesculap Ag | Electrocautery method and apparatus |
| US7942874B2 (en) * | 2005-05-12 | 2011-05-17 | Aragon Surgical, Inc. | Apparatus for tissue cauterization |
| US8728072B2 (en) * | 2005-05-12 | 2014-05-20 | Aesculap Ag | Electrocautery method and apparatus |
| US7803156B2 (en) | 2006-03-08 | 2010-09-28 | Aragon Surgical, Inc. | Method and apparatus for surgical electrocautery |
| US9339323B2 (en) | 2005-05-12 | 2016-05-17 | Aesculap Ag | Electrocautery method and apparatus |
| US7618413B2 (en) * | 2005-06-22 | 2009-11-17 | Boston Scientific Scimed, Inc. | Medical device control system |
| US8409175B2 (en) * | 2005-07-20 | 2013-04-02 | Woojin Lee | Surgical instrument guide device |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| SG165322A1 (en) | 2005-08-31 | 2010-10-28 | Schering Corp | Engineered anti-il-23 antibodies |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US11484312B2 (en) | 2005-08-31 | 2022-11-01 | Cilag Gmbh International | Staple cartridge comprising a staple driver arrangement |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US9237891B2 (en) | 2005-08-31 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical stapling devices that produce formed staples having different lengths |
| AU2006284841B2 (en) | 2005-09-01 | 2012-11-08 | Merck Sharp & Dohme Corp. | Use of IL-23 and IL-17 antagonists to treat autoimmune ocular inflammatory disease |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US11224427B2 (en) | 2006-01-31 | 2022-01-18 | Cilag Gmbh International | Surgical stapling system including a console and retraction assembly |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US20110024477A1 (en) | 2009-02-06 | 2011-02-03 | Hall Steven G | Driven Surgical Stapler Improvements |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US20110290856A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument with force-feedback capabilities |
| US11278279B2 (en) | 2006-01-31 | 2022-03-22 | Cilag Gmbh International | Surgical instrument assembly |
| ES2291112B1 (es) * | 2006-03-03 | 2008-12-16 | Corporacion Sanitaria Parc Tauli | Instrumento quirurgico para cirugia endoscopica. |
| US20070225562A1 (en) | 2006-03-23 | 2007-09-27 | Ethicon Endo-Surgery, Inc. | Articulating endoscopic accessory channel |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| BRPI0709278A2 (pt) * | 2006-03-25 | 2011-07-12 | Aponos Medical Corp | dispositivo para prender tecido, método para fixação de tecido endoscopicamente utilizando um prendedor e combinação de prendedor de tecido e dispositivo de distribuição para o dito prendedor |
| AU2007243484B2 (en) | 2006-04-24 | 2013-08-15 | Transenterix Inc. | Natural orifice surgical system |
| US8518024B2 (en) | 2006-04-24 | 2013-08-27 | Transenterix, Inc. | System and method for multi-instrument surgical access using a single access port |
| US8574229B2 (en) | 2006-05-02 | 2013-11-05 | Aesculap Ag | Surgical tool |
| BRPI0711615A2 (pt) * | 2006-05-18 | 2011-12-06 | Aponos Medical Corp | introdutor para acessar um local no corpo de um mamìfero, e método de elaboração de um introdutor tubular dobrável e com alta força de torção |
| US8105350B2 (en) * | 2006-05-23 | 2012-01-31 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7615067B2 (en) | 2006-06-05 | 2009-11-10 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US9561045B2 (en) | 2006-06-13 | 2017-02-07 | Intuitive Surgical Operations, Inc. | Tool with rotation lock |
| US7862554B2 (en) | 2007-04-16 | 2011-01-04 | Intuitive Surgical Operations, Inc. | Articulating tool with improved tension member system |
| US20080064931A1 (en) * | 2006-06-13 | 2008-03-13 | Intuitive Surgical, Inc. | Minimally invasive surgical illumination |
| US8409244B2 (en) * | 2007-04-16 | 2013-04-02 | Intuitive Surgical Operations, Inc. | Tool with end effector force limiter |
| US8322455B2 (en) | 2006-06-27 | 2012-12-04 | Ethicon Endo-Surgery, Inc. | Manually driven surgical cutting and fastening instrument |
| US8029531B2 (en) | 2006-07-11 | 2011-10-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7708758B2 (en) | 2006-08-16 | 2010-05-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7648519B2 (en) * | 2006-09-13 | 2010-01-19 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US7506791B2 (en) | 2006-09-29 | 2009-03-24 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with mechanical mechanism for limiting maximum tissue compression |
| US8475453B2 (en) * | 2006-10-06 | 2013-07-02 | Covidien Lp | Endoscopic vessel sealer and divider having a flexible articulating shaft |
| US8652120B2 (en) | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US11291441B2 (en) | 2007-01-10 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with wireless communication between control unit and remote sensor |
| US8540128B2 (en) | 2007-01-11 | 2013-09-24 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with a curved end effector |
| US11039836B2 (en) | 2007-01-11 | 2021-06-22 | Cilag Gmbh International | Staple cartridge for use with a surgical stapling instrument |
| US20080262513A1 (en) * | 2007-02-15 | 2008-10-23 | Hansen Medical, Inc. | Instrument driver having independently rotatable carriages |
| US7655004B2 (en) | 2007-02-15 | 2010-02-02 | Ethicon Endo-Surgery, Inc. | Electroporation ablation apparatus, system, and method |
| DK2426144T3 (en) | 2007-02-23 | 2019-01-07 | Merck Sharp & Dohme | Manipulated Anti-IL-23P19 Antibodies |
| SG178804A1 (en) | 2007-02-23 | 2012-03-29 | Schering Corp | Engineered anti-il-23p19 antibodies |
| CN101668531B (zh) | 2007-02-28 | 2014-05-07 | 默沙东公司 | 用于治疗免疫病症的联合治疗 |
| BRPI0807991A2 (pt) | 2007-02-28 | 2014-06-17 | Schering Corp | Anticorpos anti-il-23r elaborados. |
| US8727197B2 (en) | 2007-03-15 | 2014-05-20 | Ethicon Endo-Surgery, Inc. | Staple cartridge cavity configuration with cooperative surgical staple |
| AU2008228710A1 (en) | 2007-03-22 | 2008-09-25 | Novalign Orthopaedics, Inc. | Segmented intramedullary structure |
| US8893946B2 (en) | 2007-03-28 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Laparoscopic tissue thickness and clamp load measuring devices |
| US20080262492A1 (en) * | 2007-04-11 | 2008-10-23 | Cambridge Endoscopic Devices, Inc. | Surgical Instrument |
| US8465420B2 (en) | 2007-05-18 | 2013-06-18 | Boston Scientific Scimed, Inc. | Articulating torqueable hollow device |
| US8409245B2 (en) * | 2007-05-22 | 2013-04-02 | Woojin Lee | Surgical instrument |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US11857181B2 (en) | 2007-06-04 | 2024-01-02 | Cilag Gmbh International | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US7753245B2 (en) | 2007-06-22 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| US9005238B2 (en) * | 2007-08-23 | 2015-04-14 | Covidien Lp | Endoscopic surgical devices |
| US8579897B2 (en) | 2007-11-21 | 2013-11-12 | Ethicon Endo-Surgery, Inc. | Bipolar forceps |
| WO2009035812A1 (en) * | 2007-09-10 | 2009-03-19 | Boston Scientific Scimed, Inc. | Medical instrument with a deflectable distal portion |
| US8257386B2 (en) * | 2007-09-11 | 2012-09-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US9220398B2 (en) * | 2007-10-11 | 2015-12-29 | Intuitive Surgical Operations, Inc. | System for managing Bowden cables in articulating instruments |
| US20090112059A1 (en) | 2007-10-31 | 2009-04-30 | Nobis Rudolph H | Apparatus and methods for closing a gastrotomy |
| US8480657B2 (en) | 2007-10-31 | 2013-07-09 | Ethicon Endo-Surgery, Inc. | Detachable distal overtube section and methods for forming a sealable opening in the wall of an organ |
| JP5017065B2 (ja) * | 2007-11-21 | 2012-09-05 | 日野自動車株式会社 | 排気浄化装置 |
| US20090171147A1 (en) * | 2007-12-31 | 2009-07-02 | Woojin Lee | Surgical instrument |
| EP2249691B1 (en) * | 2008-01-24 | 2013-07-03 | Boston Scientific Scimed, Inc. | Structure for use as part of a medical device |
| US8870867B2 (en) | 2008-02-06 | 2014-10-28 | Aesculap Ag | Articulable electrosurgical instrument with a stabilizable articulation actuator |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US20090206133A1 (en) * | 2008-02-14 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | Articulatable loading units for surgical stapling and cutting instruments |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| US8758391B2 (en) | 2008-02-14 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Interchangeable tools for surgical instruments |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| BRPI0901282A2 (pt) | 2008-02-14 | 2009-11-17 | Ethicon Endo Surgery Inc | instrumento cirúrgico de corte e fixação dotado de eletrodos de rf |
| US9770245B2 (en) | 2008-02-15 | 2017-09-26 | Ethicon Llc | Layer arrangements for surgical staple cartridges |
| US11272927B2 (en) | 2008-02-15 | 2022-03-15 | Cilag Gmbh International | Layer arrangements for surgical staple cartridges |
| US20090240109A1 (en) * | 2008-03-24 | 2009-09-24 | Boston Scientific Scimed, Inc. | Flexible endoscope with core member |
| EP2268211B1 (en) * | 2008-04-11 | 2018-02-14 | The Regents of the University of Michigan | Minimal access tool |
| US10405936B2 (en) | 2008-04-11 | 2019-09-10 | The Regents Of The University Of Michigan | Parallel kinematic mechanisms with decoupled rotational motions |
| US9869339B2 (en) | 2008-04-11 | 2018-01-16 | Flexdex, Inc. | End-effector jaw closure transmission systems for remote access tools |
| US9629689B2 (en) | 2008-04-11 | 2017-04-25 | Flexdex, Inc. | Attachment apparatus for remote access tools |
| JP4705128B2 (ja) * | 2008-04-15 | 2011-06-22 | オリンパスメディカルシステムズ株式会社 | マニピュレータ |
| JP5400867B2 (ja) * | 2008-04-18 | 2014-01-29 | フォルティメディクス・サージカル・ベスローテン・フェンノートシャップ | 内視鏡用途のための器具 |
| US8771260B2 (en) | 2008-05-30 | 2014-07-08 | Ethicon Endo-Surgery, Inc. | Actuating and articulating surgical device |
| US8679003B2 (en) | 2008-05-30 | 2014-03-25 | Ethicon Endo-Surgery, Inc. | Surgical device and endoscope including same |
| US8906035B2 (en) | 2008-06-04 | 2014-12-09 | Ethicon Endo-Surgery, Inc. | Endoscopic drop off bag |
| US8403926B2 (en) | 2008-06-05 | 2013-03-26 | Ethicon Endo-Surgery, Inc. | Manually articulating devices |
| US8361112B2 (en) * | 2008-06-27 | 2013-01-29 | Ethicon Endo-Surgery, Inc. | Surgical suture arrangement |
| US9101735B2 (en) * | 2008-07-07 | 2015-08-11 | Intuitive Surgical Operations, Inc. | Catheter control systems |
| US8888792B2 (en) | 2008-07-14 | 2014-11-18 | Ethicon Endo-Surgery, Inc. | Tissue apposition clip application devices and methods |
| EP2313011A1 (en) | 2008-07-31 | 2011-04-27 | Surgical Innovations Limited | Endoscopic surgical instrument |
| US8968355B2 (en) | 2008-08-04 | 2015-03-03 | Covidien Lp | Articulating surgical device |
| JP2010035768A (ja) * | 2008-08-04 | 2010-02-18 | Olympus Medical Systems Corp | 能動駆動式医療機器 |
| US8801752B2 (en) * | 2008-08-04 | 2014-08-12 | Covidien Lp | Articulating surgical device |
| US8465475B2 (en) * | 2008-08-18 | 2013-06-18 | Intuitive Surgical Operations, Inc. | Instrument with multiple articulation locks |
| US8332072B1 (en) | 2008-08-22 | 2012-12-11 | Titan Medical Inc. | Robotic hand controller |
| US8409200B2 (en) | 2008-09-03 | 2013-04-02 | Ethicon Endo-Surgery, Inc. | Surgical grasping device |
| US20110288614A1 (en) * | 2010-05-21 | 2011-11-24 | Cryer Adrian R | Insulated electrical connection in an implantable medical device |
| KR101056232B1 (ko) * | 2008-09-12 | 2011-08-11 | 정창욱 | 최소 침습 수술 도구 및 그 사용 방법 |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| EP3456238B1 (en) * | 2008-11-18 | 2020-05-13 | United States Endoscopy Group, Inc. | Method of attaching devices to endoscopes using an adapter |
| US8157834B2 (en) | 2008-11-25 | 2012-04-17 | Ethicon Endo-Surgery, Inc. | Rotational coupling device for surgical instrument with flexible actuators |
| US20110230723A1 (en) * | 2008-12-29 | 2011-09-22 | Salvatore Castro | Active Instrument Port System for Minimally-Invasive Surgical Procedures |
| US8123721B2 (en) * | 2008-12-31 | 2012-02-28 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Catheter having independently-deflectable segments and method of its manufacture |
| US8556850B2 (en) | 2008-12-31 | 2013-10-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Shaft and handle for a catheter with independently-deflectable segments |
| US8676290B2 (en) | 2010-05-11 | 2014-03-18 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Multi-directional catheter control handle |
| US8361066B2 (en) | 2009-01-12 | 2013-01-29 | Ethicon Endo-Surgery, Inc. | Electrical ablation devices |
| US20100198248A1 (en) * | 2009-02-02 | 2010-08-05 | Ethicon Endo-Surgery, Inc. | Surgical dissector |
| US8517239B2 (en) | 2009-02-05 | 2013-08-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising a magnetic element driver |
| US8444036B2 (en) | 2009-02-06 | 2013-05-21 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with mechanisms for adjusting a tissue gap within the end effector |
| CN102341048A (zh) | 2009-02-06 | 2012-02-01 | 伊西康内外科公司 | 动力手术缝合器的改进 |
| AU2010220421B9 (en) | 2009-03-02 | 2015-03-05 | Aduro Biotech Holdings, Europe B.V. | Antibodies against a proliferating inducing ligand (APRIL) |
| US8423182B2 (en) | 2009-03-09 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Adaptable integrated energy control system for electrosurgical tools in robotic surgical systems |
| US20100249497A1 (en) * | 2009-03-30 | 2010-09-30 | Peine William J | Surgical instrument |
| DE102009017581B4 (de) * | 2009-04-18 | 2021-06-24 | Igus Gmbh | Mehrachsengelenk insbesondere für die Robotik |
| EP2432499A2 (en) | 2009-05-20 | 2012-03-28 | Schering Corporation | Modulation of pilr receptors to treat microbial infections |
| US20110022078A1 (en) | 2009-07-23 | 2011-01-27 | Cameron Dale Hinman | Articulating mechanism |
| US20110184231A1 (en) * | 2009-07-28 | 2011-07-28 | Page Brett M | Deflectable instrument ports |
| SG177689A1 (en) | 2009-07-31 | 2012-02-28 | Organon Nv | Fully human antibodies to btla |
| DE102009037030A1 (de) | 2009-08-13 | 2011-02-17 | Olympus Winter & Ibe Gmbh | Schaft eines chirurgischen Instrumentes mit starrem Abschnitt |
| DE102009037029A1 (de) | 2009-08-13 | 2011-02-17 | Olympus Winter & Ibe Gmbh | Schaft eines chirurgischen Instrumentes mit biegbaren Bereichen |
| EP2287478B1 (en) * | 2009-08-17 | 2012-10-03 | University Of Dundee | Element for transmitting pulling and pushing forces as well as a torque |
| RU2595409C2 (ru) | 2009-09-03 | 2016-08-27 | Мерк Шарп И Доум Корп., | Анти-gitr-антитела |
| US9750563B2 (en) | 2009-09-22 | 2017-09-05 | Mederi Therapeutics, Inc. | Systems and methods for treating tissue with radiofrequency energy |
| US9474565B2 (en) | 2009-09-22 | 2016-10-25 | Mederi Therapeutics, Inc. | Systems and methods for treating tissue with radiofrequency energy |
| US9775664B2 (en) | 2009-09-22 | 2017-10-03 | Mederi Therapeutics, Inc. | Systems and methods for treating tissue with radiofrequency energy |
| ES2388867B1 (es) * | 2009-10-27 | 2013-09-18 | Universitat Politècnica De Catalunya | Pinzas para cirugia laparoscópica mínimamente invasiva. |
| US20110098704A1 (en) | 2009-10-28 | 2011-04-28 | Ethicon Endo-Surgery, Inc. | Electrical ablation devices |
| US8888687B2 (en) * | 2009-10-28 | 2014-11-18 | Boston Scientific Scimed, Inc. | Method and apparatus related to a flexible assembly at a distal end portion of a medical device |
| MX2012005180A (es) | 2009-11-04 | 2012-06-08 | Merck Sharp & Dohme | Anticuerpo anti-linfopoyetina estromal timica (anti-tslp) modificado por tecnicas de ingenieria genetica. |
| US8608652B2 (en) | 2009-11-05 | 2013-12-17 | Ethicon Endo-Surgery, Inc. | Vaginal entry surgical devices, kit, system, and method |
| US20110112517A1 (en) * | 2009-11-06 | 2011-05-12 | Peine Willliam J | Surgical instrument |
| US8996173B2 (en) | 2010-09-21 | 2015-03-31 | Intuitive Surgical Operations, Inc. | Method and apparatus for hand gesture control in a minimally invasive surgical system |
| US8543240B2 (en) * | 2009-11-13 | 2013-09-24 | Intuitive Surgical Operations, Inc. | Master finger tracking device and method of use in a minimally invasive surgical system |
| US8682489B2 (en) * | 2009-11-13 | 2014-03-25 | Intuitive Sugical Operations, Inc. | Method and system for hand control of a teleoperated minimally invasive slave surgical instrument |
| US8521331B2 (en) | 2009-11-13 | 2013-08-27 | Intuitive Surgical Operations, Inc. | Patient-side surgeon interface for a minimally invasive, teleoperated surgical instrument |
| US8935003B2 (en) | 2010-09-21 | 2015-01-13 | Intuitive Surgical Operations | Method and system for hand presence detection in a minimally invasive surgical system |
| GB0920938D0 (en) * | 2009-11-30 | 2010-01-13 | Imp Innovations Ltd | Steerable probes |
| US9986893B2 (en) | 2009-12-15 | 2018-06-05 | Cornell University | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US11877722B2 (en) | 2009-12-15 | 2024-01-23 | Cornell University | Method and apparatus for manipulating the side wall of a body lumen or body cavity |
| WO2011084490A1 (en) | 2009-12-15 | 2011-07-14 | Cornell University | Method and apparatus for stabilizing, straightening, or expanding the wall of a lumen or cavity |
| US10149601B2 (en) | 2009-12-15 | 2018-12-11 | Lumendi Ltd. | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US10485401B2 (en) | 2009-12-15 | 2019-11-26 | Lumendi Ltd. | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US8353487B2 (en) | 2009-12-17 | 2013-01-15 | Ethicon Endo-Surgery, Inc. | User interface support devices for endoscopic surgical instruments |
| WO2011084357A1 (en) | 2009-12-17 | 2011-07-14 | Schering Corporation | Modulation of pilr to treat immune disorders |
| US8496574B2 (en) | 2009-12-17 | 2013-07-30 | Ethicon Endo-Surgery, Inc. | Selectively positionable camera for surgical guide tube assembly |
| US9028483B2 (en) | 2009-12-18 | 2015-05-12 | Ethicon Endo-Surgery, Inc. | Surgical instrument comprising an electrode |
| US8506564B2 (en) | 2009-12-18 | 2013-08-13 | Ethicon Endo-Surgery, Inc. | Surgical instrument comprising an electrode |
| US8220688B2 (en) | 2009-12-24 | 2012-07-17 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument with electric actuator directional control assembly |
| US8851354B2 (en) | 2009-12-24 | 2014-10-07 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument that analyzes tissue thickness |
| DE102009055377A1 (de) * | 2009-12-29 | 2011-06-30 | Olympus Winter & Ibe GmbH, 22045 | Rohrförmiger Schaft eines chirurgischen Instruments |
| EP2528518B1 (en) | 2010-01-26 | 2017-12-13 | Artack Medical (2013) Ltd. | Articulating medical instrument |
| US9005198B2 (en) | 2010-01-29 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Surgical instrument comprising an electrode |
| CN102596080B (zh) | 2010-02-04 | 2016-04-20 | 蛇牌股份公司 | 腹腔镜射频手术装置 |
| US8827992B2 (en) | 2010-03-26 | 2014-09-09 | Aesculap Ag | Impedance mediated control of power delivery for electrosurgery |
| US8419727B2 (en) | 2010-03-26 | 2013-04-16 | Aesculap Ag | Impedance mediated power delivery for electrosurgery |
| US9289147B2 (en) | 2010-05-11 | 2016-03-22 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Multi-directional flexible wire harness for medical devices |
| AU2011275749C1 (en) | 2010-07-09 | 2015-09-17 | Aduro Biotech Holdings, Europe B.V. | Agonistic antibody to CD27 |
| US8783543B2 (en) | 2010-07-30 | 2014-07-22 | Ethicon Endo-Surgery, Inc. | Tissue acquisition arrangements and methods for surgical stapling devices |
| US9173698B2 (en) | 2010-09-17 | 2015-11-03 | Aesculap Ag | Electrosurgical tissue sealing augmented with a seal-enhancing composition |
| US9402682B2 (en) | 2010-09-24 | 2016-08-02 | Ethicon Endo-Surgery, Llc | Articulation joint features for articulating surgical device |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9386988B2 (en) | 2010-09-30 | 2016-07-12 | Ethicon End-Surgery, LLC | Retainer assembly including a tissue thickness compensator |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US11298125B2 (en) | 2010-09-30 | 2022-04-12 | Cilag Gmbh International | Tissue stapler having a thickness compensator |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US9211120B2 (en) | 2011-04-29 | 2015-12-15 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a plurality of medicaments |
| US9016542B2 (en) | 2010-09-30 | 2015-04-28 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising compressible distortion resistant components |
| US9517063B2 (en) | 2012-03-28 | 2016-12-13 | Ethicon Endo-Surgery, Llc | Movable member for use with a tissue thickness compensator |
| US9282962B2 (en) | 2010-09-30 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Adhesive film laminate |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US9364233B2 (en) | 2010-09-30 | 2016-06-14 | Ethicon Endo-Surgery, Llc | Tissue thickness compensators for circular surgical staplers |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| EP2645943A1 (en) * | 2010-12-02 | 2013-10-09 | Agile Endosurgery, Inc. | Surgical tool |
| CN102008341B (zh) * | 2010-12-31 | 2012-11-28 | 徐志明 | 一种万向医用钳 |
| US10092291B2 (en) | 2011-01-25 | 2018-10-09 | Ethicon Endo-Surgery, Inc. | Surgical instrument with selectively rigidizable features |
| EP2670288B1 (en) | 2011-01-31 | 2017-05-31 | Boston Scientific Scimed, Inc. | Articulation section with locking |
| EP2670317B1 (en) | 2011-01-31 | 2021-09-15 | Boston Scientific Scimed, Inc. | Medical devices having releasable coupling |
| US9233241B2 (en) | 2011-02-28 | 2016-01-12 | Ethicon Endo-Surgery, Inc. | Electrical ablation devices and methods |
| US9314620B2 (en) | 2011-02-28 | 2016-04-19 | Ethicon Endo-Surgery, Inc. | Electrical ablation devices and methods |
| US9254169B2 (en) | 2011-02-28 | 2016-02-09 | Ethicon Endo-Surgery, Inc. | Electrical ablation devices and methods |
| US9049987B2 (en) | 2011-03-17 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Hand held surgical device for manipulating an internal magnet assembly within a patient |
| US9168050B1 (en) | 2011-03-24 | 2015-10-27 | Cambridge Endoscopic Devices, Inc. | End effector construction |
| US10307038B2 (en) * | 2011-03-29 | 2019-06-04 | Covidien Lp | System and method for performing surgical procedures with a modular surgical system |
| RU2633509C2 (ru) | 2011-03-31 | 2017-10-12 | Мерк Шарп И Доум Корп. | Стабильные составы антител против рецептора программируемой смерти pd-1 человека и относящиеся к ним способы лечения |
| MX2013011564A (es) * | 2011-04-06 | 2014-04-30 | Medrobotics Corp | Herramientas quirurgicas de articulacion y vainas de herramientas, metodos para desplegar las mismas. |
| CA2834649C (en) | 2011-04-29 | 2021-02-16 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9901412B2 (en) | 2011-04-29 | 2018-02-27 | Vanderbilt University | Dexterous surgical manipulator and method of use |
| USD726905S1 (en) | 2011-05-11 | 2015-04-14 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Control handle for a medical device |
| JP2014517747A (ja) * | 2011-05-12 | 2014-07-24 | インペリアル・イノベイションズ・リミテッド | 低侵襲手術のための医療用マスタ/スレーブ型装置 |
| US9161771B2 (en) | 2011-05-13 | 2015-10-20 | Intuitive Surgical Operations Inc. | Medical instrument with snake wrist structure |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US11207064B2 (en) | 2011-05-27 | 2021-12-28 | Cilag Gmbh International | Automated end effector component reloading system for use with a robotic system |
| US9339327B2 (en) | 2011-06-28 | 2016-05-17 | Aesculap Ag | Electrosurgical tissue dissecting device |
| WO2013016275A1 (en) | 2011-07-22 | 2013-01-31 | Cook Medical Technologies Llc | Irrigation devices adapted to be used with a light source for the identification and treatment of bodily passages |
| US9119639B2 (en) * | 2011-08-09 | 2015-09-01 | DePuy Synthes Products, Inc. | Articulated cavity creator |
| KR101336944B1 (ko) * | 2011-11-03 | 2013-12-04 | 송재현 | 자세교정 의자 |
| US9839435B2 (en) | 2011-11-14 | 2017-12-12 | The University Of British Columbia | Intramedullary fixation system for management of pelvic and acetabular fractures |
| CN104093370B (zh) | 2011-11-23 | 2017-02-22 | 利思梅德株式会社 | 手术用器械 |
| US9375138B2 (en) | 2011-11-25 | 2016-06-28 | Cook Medical Technologies Llc | Steerable guide member and catheter |
| EP2785497B1 (en) * | 2011-12-02 | 2022-10-26 | Boston Scientific Scimed, Inc. | Positioning device and articulation assembly for remote positioning of a tool |
| KR101833347B1 (ko) * | 2012-02-06 | 2018-02-28 | 삼성전자주식회사 | 링크 유닛, 암 모듈 및 이들을 가지는 수술용 장치 |
| US8419720B1 (en) | 2012-02-07 | 2013-04-16 | National Advanced Endoscopy Devices, Incorporated | Flexible laparoscopic device |
| US9044230B2 (en) | 2012-02-13 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical cutting and fastening instrument with apparatus for determining cartridge and firing motion status |
| BR112014024098B1 (pt) | 2012-03-28 | 2021-05-25 | Ethicon Endo-Surgery, Inc. | cartucho de grampos |
| CN104379068B (zh) | 2012-03-28 | 2017-09-22 | 伊西康内外科公司 | 包括组织厚度补偿件的保持器组件 |
| BR112014024102B1 (pt) | 2012-03-28 | 2022-03-03 | Ethicon Endo-Surgery, Inc | Conjunto de cartucho de prendedores para um instrumento cirúrgico, e conjunto de atuador de extremidade para um instrumento cirúrgico |
| US9211134B2 (en) | 2012-04-09 | 2015-12-15 | Carefusion 2200, Inc. | Wrist assembly for articulating laparoscopic surgical instruments |
| CN102633116A (zh) * | 2012-04-12 | 2012-08-15 | 天津四通汇恒科技有限公司 | 仿生多关节搬运机械手臂 |
| EP2844164B1 (en) * | 2012-05-04 | 2016-06-29 | Agile Endosurgery, Inc. | Surgical tool |
| WO2013168975A1 (ko) * | 2012-05-07 | 2013-11-14 | Jeong Chang Wook | 가변 굴곡을 갖는 최소 침습 수술 기구 |
| US9427255B2 (en) | 2012-05-14 | 2016-08-30 | Ethicon Endo-Surgery, Inc. | Apparatus for introducing a steerable camera assembly into a patient |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| JP6290201B2 (ja) | 2012-06-28 | 2018-03-07 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 空クリップカートリッジ用のロックアウト |
| US9282974B2 (en) | 2012-06-28 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Empty clip cartridge lockout |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US9226751B2 (en) | 2012-06-28 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument system including replaceable end effectors |
| US11278284B2 (en) | 2012-06-28 | 2022-03-22 | Cilag Gmbh International | Rotary drive arrangements for surgical instruments |
| BR112014032776B1 (pt) | 2012-06-28 | 2021-09-08 | Ethicon Endo-Surgery, Inc | Sistema de instrumento cirúrgico e kit cirúrgico para uso com um sistema de instrumento cirúrgico |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US9204879B2 (en) | 2012-06-28 | 2015-12-08 | Ethicon Endo-Surgery, Inc. | Flexible drive member |
| US9078662B2 (en) | 2012-07-03 | 2015-07-14 | Ethicon Endo-Surgery, Inc. | Endoscopic cap electrode and method for using the same |
| DE102012211886A1 (de) * | 2012-07-06 | 2014-01-09 | Technische Universität Berlin | Medizinisches Instrument und Verfahren zum Verschwenken eines solchen medizinischen Instruments |
| US9545290B2 (en) | 2012-07-30 | 2017-01-17 | Ethicon Endo-Surgery, Inc. | Needle probe guide |
| US9572623B2 (en) | 2012-08-02 | 2017-02-21 | Ethicon Endo-Surgery, Inc. | Reusable electrode and disposable sheath |
| US8986225B2 (en) | 2012-08-02 | 2015-03-24 | Covidien Lp | Guidewire |
| US10314649B2 (en) | 2012-08-02 | 2019-06-11 | Ethicon Endo-Surgery, Inc. | Flexible expandable electrode and method of intraluminal delivery of pulsed power |
| US9277957B2 (en) | 2012-08-15 | 2016-03-08 | Ethicon Endo-Surgery, Inc. | Electrosurgical devices and methods |
| EP2890316A4 (en) * | 2012-08-30 | 2016-08-10 | Human Extensions Ltd | INTERFACE BETWEEN A USER AND LAPAROSCOPIC INSTRUMENTS |
| US9301811B2 (en) | 2012-09-17 | 2016-04-05 | Intuitive Surgical Operations, Inc. | Methods and systems for assigning input devices to teleoperated surgical instrument functions |
| US9314593B2 (en) | 2012-09-24 | 2016-04-19 | Cook Medical Technologies Llc | Medical devices for the identification and treatment of bodily passages |
| KR102210195B1 (ko) | 2012-09-26 | 2021-01-29 | 아에스쿨랍 아게 | 조직을 커팅 및 봉합하기 위한 장치 |
| EP2787904B1 (en) | 2012-10-06 | 2015-07-29 | Steerable Instruments BVBA | Crosstalk reducing handle for surgical articulated instruments |
| US10631939B2 (en) | 2012-11-02 | 2020-04-28 | Intuitive Surgical Operations, Inc. | Systems and methods for mapping flux supply paths |
| US10864048B2 (en) | 2012-11-02 | 2020-12-15 | Intuitive Surgical Operations, Inc. | Flux disambiguation for teleoperated surgical systems |
| US10029073B2 (en) * | 2012-11-13 | 2018-07-24 | Abbott Cardiovascular Systems, Inc. | Steerable assembly for surgical catheter |
| CN103085083B (zh) * | 2013-01-07 | 2015-06-24 | 汪雯 | 可弯转可伸缩的柔性连续体机械结构 |
| US9439693B2 (en) | 2013-02-01 | 2016-09-13 | DePuy Synthes Products, Inc. | Steerable needle assembly for use in vertebral body augmentation |
| CN105026116B (zh) * | 2013-02-27 | 2017-03-08 | 奥林巴斯株式会社 | 机械手 |
| US10098527B2 (en) | 2013-02-27 | 2018-10-16 | Ethidcon Endo-Surgery, Inc. | System for performing a minimally invasive surgical procedure |
| US9895055B2 (en) | 2013-02-28 | 2018-02-20 | Cook Medical Technologies Llc | Medical devices, systems, and methods for the visualization and treatment of bodily passages |
| JP6345707B2 (ja) | 2013-03-01 | 2018-06-20 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | ソフトストップを備えた外科用器具 |
| JP6382235B2 (ja) | 2013-03-01 | 2018-08-29 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 信号通信用の導電路を備えた関節運動可能な外科用器具 |
| US10383691B2 (en) | 2013-03-13 | 2019-08-20 | The Spectranetics Corporation | Last catheter with helical internal lumen |
| US9283040B2 (en) * | 2013-03-13 | 2016-03-15 | The Spectranetics Corporation | Device and method of ablative cutting with helical tip |
| US9456872B2 (en) | 2013-03-13 | 2016-10-04 | The Spectranetics Corporation | Laser ablation catheter |
| US9402644B2 (en) * | 2013-03-13 | 2016-08-02 | Covidien Lp | Reverse seam ripper dissector |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| US9332987B2 (en) | 2013-03-14 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Control arrangements for a drive member of a surgical instrument |
| EP2977150B1 (en) * | 2013-03-18 | 2017-06-28 | Olympus Corporation | Manipulator |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US9844368B2 (en) | 2013-04-16 | 2017-12-19 | Ethicon Llc | Surgical system comprising first and second drive systems |
| US9357984B2 (en) | 2013-04-23 | 2016-06-07 | Covidien Lp | Constant value gap stabilizer for articulating links |
| WO2014189876A1 (en) | 2013-05-20 | 2014-11-27 | Medrobotics Corporation | Articulating surgical instruments and method of deploying the same |
| US20140352483A1 (en) * | 2013-06-04 | 2014-12-04 | General Electric Company | Remote alignment tool |
| US20140360308A1 (en) * | 2013-06-10 | 2014-12-11 | Donal Walker Lumsden | Mechanical maneuvering system |
| JP6274630B2 (ja) * | 2013-06-19 | 2018-02-07 | タイタン メディカル インコーポレイテッドTitan Medical Inc. | 多関節器具位置決め装置およびそれを採用するシステム |
| US9549748B2 (en) | 2013-08-01 | 2017-01-24 | Cook Medical Technologies Llc | Methods of locating and treating tissue in a wall defining a bodily passage |
| AR097306A1 (es) | 2013-08-20 | 2016-03-02 | Merck Sharp & Dohme | Modulación de la inmunidad tumoral |
| US20150053746A1 (en) | 2013-08-23 | 2015-02-26 | Ethicon Endo-Surgery, Inc. | Torque optimization for surgical instruments |
| JP6416260B2 (ja) | 2013-08-23 | 2018-10-31 | エシコン エルエルシー | 動力付き外科用器具のための発射部材後退装置 |
| US9270021B1 (en) | 2013-09-06 | 2016-02-23 | M.M.A. Design, LLC | Low-profile mast array |
| US10149694B2 (en) | 2013-09-13 | 2018-12-11 | Vanderbilt University | Energy balance mechanism for flexure joint |
| KR101557008B1 (ko) * | 2013-11-06 | 2015-10-02 | 주식회사 비씨엠 | 인체 내강 시술용 처치 장치 |
| CN110074844B (zh) | 2013-12-11 | 2023-02-17 | 柯惠Lp公司 | 用于机器人手术系统的腕组件及钳夹组件 |
| AU2014374201A1 (en) * | 2013-12-30 | 2016-07-07 | Medrobotics Corporation | Articulated robotic probes |
| US9962161B2 (en) | 2014-02-12 | 2018-05-08 | Ethicon Llc | Deliverable surgical instrument |
| CN111938820A (zh) | 2014-02-21 | 2020-11-17 | 直观外科手术操作公司 | 机械接头以及相关的系统和方法 |
| CN106232029B (zh) | 2014-02-24 | 2019-04-12 | 伊西康内外科有限责任公司 | 包括击发构件锁定件的紧固系统 |
| US9937323B2 (en) | 2014-02-28 | 2018-04-10 | Cook Medical Technologies Llc | Deflectable catheters, systems, and methods for the visualization and treatment of bodily passages |
| WO2015134750A1 (en) | 2014-03-06 | 2015-09-11 | University Of British Columbia | Shape adaptable intramedullary fixation device |
| US10219817B2 (en) * | 2014-03-13 | 2019-03-05 | Lsi Solutions, Inc. | Surgical clamp and clamp jaw |
| US10166061B2 (en) | 2014-03-17 | 2019-01-01 | Intuitive Surgical Operations, Inc. | Teleoperated surgical system equipment with user interface |
| US9733663B2 (en) | 2014-03-26 | 2017-08-15 | Ethicon Llc | Power management through segmented circuit and variable voltage protection |
| US10201364B2 (en) | 2014-03-26 | 2019-02-12 | Ethicon Llc | Surgical instrument comprising a rotatable shaft |
| US10004497B2 (en) | 2014-03-26 | 2018-06-26 | Ethicon Llc | Interface systems for use with surgical instruments |
| BR112016021943B1 (pt) | 2014-03-26 | 2022-06-14 | Ethicon Endo-Surgery, Llc | Instrumento cirúrgico para uso por um operador em um procedimento cirúrgico |
| US20150297223A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| US10561422B2 (en) | 2014-04-16 | 2020-02-18 | Ethicon Llc | Fastener cartridge comprising deployable tissue engaging members |
| JP6636452B2 (ja) | 2014-04-16 | 2020-01-29 | エシコン エルエルシーEthicon LLC | 異なる構成を有する延在部を含む締結具カートリッジ |
| US10327764B2 (en) | 2014-09-26 | 2019-06-25 | Ethicon Llc | Method for creating a flexible staple line |
| JP6532889B2 (ja) | 2014-04-16 | 2019-06-19 | エシコン エルエルシーEthicon LLC | 締結具カートリッジ組立体及びステープル保持具カバー配置構成 |
| BR112016023825B1 (pt) | 2014-04-16 | 2022-08-02 | Ethicon Endo-Surgery, Llc | Cartucho de grampos para uso com um grampeador cirúrgico e cartucho de grampos para uso com um instrumento cirúrgico |
| US10080552B2 (en) | 2014-04-21 | 2018-09-25 | Covidien Lp | Adapter assembly with gimbal for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| US9724168B2 (en) | 2014-04-22 | 2017-08-08 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US11801099B2 (en) | 2014-04-22 | 2023-10-31 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US11090123B2 (en) | 2014-04-22 | 2021-08-17 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US9855108B2 (en) | 2014-04-22 | 2018-01-02 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US9895200B2 (en) | 2014-04-22 | 2018-02-20 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US11154368B2 (en) | 2014-04-22 | 2021-10-26 | Bio-Medical Engineering (HK) Limited | Port assembly for use with robotic devices and systems to perform single incision procedures and natural orifice translumenal endoscopic surgical procedures |
| KR101584766B1 (ko) | 2014-04-24 | 2016-01-12 | 주식회사 리브스메드 | 수술용 인스트루먼트 |
| US10405924B2 (en) | 2014-05-30 | 2019-09-10 | The Spectranetics Corporation | System and method of ablative cutting and vacuum aspiration through primary orifice and auxiliary side port |
| WO2015187361A1 (en) * | 2014-06-07 | 2015-12-10 | Mederi Terapeutics, Inc. | Systems and methods for treating tissue with radiofrequency energy |
| US10045781B2 (en) | 2014-06-13 | 2018-08-14 | Ethicon Llc | Closure lockout systems for surgical instruments |
| DE102014010181B4 (de) * | 2014-07-09 | 2021-03-11 | Schölly Fiberoptic GmbH | Manipulations- und/oder Untersuchungs-Instrument |
| US10195398B2 (en) | 2014-08-13 | 2019-02-05 | Cook Medical Technologies Llc | Tension member seal and securing mechanism for medical devices |
| JO3663B1 (ar) | 2014-08-19 | 2020-08-27 | Merck Sharp & Dohme | الأجسام المضادة لمضاد lag3 وأجزاء ربط الأنتيجين |
| TWI790593B (zh) | 2014-08-19 | 2023-01-21 | 美商默沙東有限責任公司 | 抗tigit抗體 |
| CN106714721B (zh) | 2014-08-27 | 2019-09-17 | 可控仪器制造公众有限公司 | 用于能转向工具的转矩-传输转向机构 |
| US10111679B2 (en) | 2014-09-05 | 2018-10-30 | Ethicon Llc | Circuitry and sensors for powered medical device |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US11311294B2 (en) | 2014-09-05 | 2022-04-26 | Cilag Gmbh International | Powered medical device including measurement of closure state of jaws |
| US10105142B2 (en) | 2014-09-18 | 2018-10-23 | Ethicon Llc | Surgical stapler with plurality of cutting elements |
| JP6648119B2 (ja) | 2014-09-26 | 2020-02-14 | エシコン エルエルシーEthicon LLC | 外科ステープル留めバットレス及び付属物材料 |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| US11357483B2 (en) * | 2014-09-26 | 2022-06-14 | Intuitive Surgical Operations, Inc. | Surgical instrument with flexible shaft and actuation element guide |
| US10709467B2 (en) | 2014-10-02 | 2020-07-14 | Livsmed Inc. | Surgical instrument |
| US10076325B2 (en) | 2014-10-13 | 2018-09-18 | Ethicon Llc | Surgical stapling apparatus comprising a tissue stop |
| EP4245233A3 (en) * | 2014-10-14 | 2023-12-06 | The University of British Columbia | Systems for intramedullary bone fixation |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| DE102014115600A1 (de) * | 2014-10-27 | 2016-04-28 | Karl Storz Gmbh & Co. Kg | Chirurgisches Instrument mit einer manuellen Steuervorrichtung |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US9844376B2 (en) | 2014-11-06 | 2017-12-19 | Ethicon Llc | Staple cartridge comprising a releasable adjunct material |
| EP3229656B1 (en) | 2014-12-08 | 2019-05-01 | Steerable Instruments nv | Guide for steering wires for a steering mechanism for a steerable tool |
| EP3166514B1 (en) | 2014-12-08 | 2018-03-21 | Steerable Instruments NV | Motion amplifier for a steering mechanism of a steerable tool |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| US10117649B2 (en) | 2014-12-18 | 2018-11-06 | Ethicon Llc | Surgical instrument assembly comprising a lockable articulation system |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| US10188385B2 (en) | 2014-12-18 | 2019-01-29 | Ethicon Llc | Surgical instrument system comprising lockable systems |
| MX2017008108A (es) | 2014-12-18 | 2018-03-06 | Ethicon Llc | Instrumento quirurgico con un yunque que puede moverse de manera selectiva sobre un eje discreto no movil con relacion a un cartucho de grapas. |
| US10004501B2 (en) | 2014-12-18 | 2018-06-26 | Ethicon Llc | Surgical instruments with improved closure arrangements |
| US9844375B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Drive arrangements for articulatable surgical instruments |
| US9987000B2 (en) * | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| CN105759418B (zh) * | 2014-12-19 | 2019-06-28 | 深圳市锐丽视科技有限公司 | 挠性数码内窥镜 |
| NL2014108B1 (en) | 2015-01-09 | 2016-09-30 | Aduro Biotech Holdings Europe B V | Altered april binding antibodies. |
| KR102153407B1 (ko) | 2015-02-17 | 2020-09-08 | 주식회사 리브스메드 | 수술용 인스트루먼트 |
| US11344381B2 (en) | 2015-02-17 | 2022-05-31 | Livsmed Inc. | Instrument for surgery |
| US11896336B2 (en) | 2015-02-17 | 2024-02-13 | Livsmed Inc. | Instrument for surgery |
| CN107249498A (zh) | 2015-02-19 | 2017-10-13 | 柯惠Lp公司 | 机器人手术系统的输入装置的重定位方法 |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US10180463B2 (en) | 2015-02-27 | 2019-01-15 | Ethicon Llc | Surgical apparatus configured to assess whether a performance parameter of the surgical apparatus is within an acceptable performance band |
| US10321907B2 (en) | 2015-02-27 | 2019-06-18 | Ethicon Llc | System for monitoring whether a surgical instrument needs to be serviced |
| US9993258B2 (en) | 2015-02-27 | 2018-06-12 | Ethicon Llc | Adaptable surgical instrument handle |
| US10149956B2 (en) * | 2015-02-28 | 2018-12-11 | John P. Ure | Bi-lateral endobronchial suctioning device and medical suctioning system for intubated patients |
| WO2016139589A2 (en) * | 2015-03-02 | 2016-09-09 | Koninklijke Philips N.V. | Variable configuration bending neck for an articulating ultrasound probe |
| US11707184B2 (en) | 2015-03-02 | 2023-07-25 | Koninklijke Philips N.V. | Single piece bending neck for an articulating ultrasound probe |
| US9993248B2 (en) | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US10245033B2 (en) | 2015-03-06 | 2019-04-02 | Ethicon Llc | Surgical instrument comprising a lockable battery housing |
| US10687806B2 (en) | 2015-03-06 | 2020-06-23 | Ethicon Llc | Adaptive tissue compression techniques to adjust closure rates for multiple tissue types |
| US9808246B2 (en) | 2015-03-06 | 2017-11-07 | Ethicon Endo-Surgery, Llc | Method of operating a powered surgical instrument |
| US9924961B2 (en) | 2015-03-06 | 2018-03-27 | Ethicon Endo-Surgery, Llc | Interactive feedback system for powered surgical instruments |
| US10617412B2 (en) | 2015-03-06 | 2020-04-14 | Ethicon Llc | System for detecting the mis-insertion of a staple cartridge into a surgical stapler |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US10548504B2 (en) | 2015-03-06 | 2020-02-04 | Ethicon Llc | Overlaid multi sensor radio frequency (RF) electrode system to measure tissue compression |
| US9901342B2 (en) | 2015-03-06 | 2018-02-27 | Ethicon Endo-Surgery, Llc | Signal and power communication system positioned on a rotatable shaft |
| US10045776B2 (en) | 2015-03-06 | 2018-08-14 | Ethicon Llc | Control techniques and sub-processor contained within modular shaft with select control processing from handle |
| WO2016144937A1 (en) | 2015-03-10 | 2016-09-15 | Covidien Lp | Measuring health of a connector member of a robotic surgical system |
| CN104873167A (zh) * | 2015-03-27 | 2015-09-02 | 广州医科大学附属第一医院 | 一种用于经皮肾镜手术的软性可弯曲电子肾镜及其使用方法 |
| US9581190B2 (en) | 2015-03-30 | 2017-02-28 | Hilel Richman | Adjustable support arm |
| US10213201B2 (en) | 2015-03-31 | 2019-02-26 | Ethicon Llc | Stapling end effector configured to compensate for an uneven gap between a first jaw and a second jaw |
| EP3282952B1 (en) | 2015-04-03 | 2019-12-25 | The Regents Of The University Of Michigan | Tension management apparatus for cable-driven transmission |
| US10226239B2 (en) | 2015-04-10 | 2019-03-12 | Covidien Lp | Adapter assembly with gimbal for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| US10034683B2 (en) * | 2015-04-16 | 2018-07-31 | Ethicon Llc | Ultrasonic surgical instrument with rigidizing articulation drive members |
| EP3223734B1 (en) * | 2015-04-22 | 2020-06-10 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| WO2016187056A1 (en) * | 2015-05-15 | 2016-11-24 | The Johns Hopkins University | Manipulator device and therapeutic and diagnostic methods |
| JP6714618B2 (ja) | 2015-06-03 | 2020-06-24 | コヴィディエン リミテッド パートナーシップ | オフセット計器駆動装置 |
| US9844886B2 (en) * | 2015-06-09 | 2017-12-19 | Timothy R. Beevers | Tendon systems for robots |
| US10507068B2 (en) | 2015-06-16 | 2019-12-17 | Covidien Lp | Robotic surgical system torque transduction sensing |
| EP3311729A4 (en) * | 2015-06-16 | 2019-02-06 | Olympus Corporation | ARTICULATION RING AND MEDICAL MANIPULATOR |
| US10368861B2 (en) | 2015-06-18 | 2019-08-06 | Ethicon Llc | Dual articulation drive system arrangements for articulatable surgical instruments |
| US10779897B2 (en) | 2015-06-23 | 2020-09-22 | Covidien Lp | Robotic surgical assemblies |
| US10492857B2 (en) | 2015-08-06 | 2019-12-03 | Boston Scientific Scimed Inc | Deployment control apparatus for a catheter with a deployable array |
| US9931487B2 (en) | 2015-08-06 | 2018-04-03 | Boston Scientific Scimed, Inc. | Bidirectional steering control apparatus for a catheter |
| WO2017031132A1 (en) | 2015-08-17 | 2017-02-23 | Intuitive Surgical Operations, Inc. | Unground master control devices and methods of use |
| US11058425B2 (en) | 2015-08-17 | 2021-07-13 | Ethicon Llc | Implantable layers for a surgical instrument |
| US10357251B2 (en) | 2015-08-26 | 2019-07-23 | Ethicon Llc | Surgical staples comprising hardness variations for improved fastening of tissue |
| US10363036B2 (en) | 2015-09-23 | 2019-07-30 | Ethicon Llc | Surgical stapler having force-based motor control |
| US10085751B2 (en) | 2015-09-23 | 2018-10-02 | Ethicon Llc | Surgical stapler having temperature-based motor control |
| US10076326B2 (en) | 2015-09-23 | 2018-09-18 | Ethicon Llc | Surgical stapler having current mirror-based motor control |
| US10238386B2 (en) | 2015-09-23 | 2019-03-26 | Ethicon Llc | Surgical stapler having motor control based on an electrical parameter related to a motor current |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US10327769B2 (en) | 2015-09-23 | 2019-06-25 | Ethicon Llc | Surgical stapler having motor control based on a drive system component |
| US10299878B2 (en) | 2015-09-25 | 2019-05-28 | Ethicon Llc | Implantable adjunct systems for determining adjunct skew |
| WO2017053363A1 (en) | 2015-09-25 | 2017-03-30 | Covidien Lp | Robotic surgical assemblies and instrument drive connectors thereof |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10285699B2 (en) | 2015-09-30 | 2019-05-14 | Ethicon Llc | Compressible adjunct |
| US10980539B2 (en) | 2015-09-30 | 2021-04-20 | Ethicon Llc | Implantable adjunct comprising bonded layers |
| US10327777B2 (en) | 2015-09-30 | 2019-06-25 | Ethicon Llc | Implantable layer comprising plastically deformed fibers |
| US9814451B2 (en) | 2015-10-02 | 2017-11-14 | Flexdex, Inc. | Handle mechanism providing unlimited roll |
| CN108472025A (zh) | 2015-10-05 | 2018-08-31 | 弗莱克斯德克斯公司 | 具有平滑铰接的多簇接头的医疗装置 |
| US11896255B2 (en) | 2015-10-05 | 2024-02-13 | Flexdex, Inc. | End-effector jaw closure transmission systems for remote access tools |
| ITUB20154977A1 (it) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Strumento medicale e metodo di fabbricazione di detto strumento medicale |
| US10912449B2 (en) | 2015-10-23 | 2021-02-09 | Covidien Lp | Surgical system for detecting gradual changes in perfusion |
| JO3555B1 (ar) | 2015-10-29 | 2020-07-05 | Merck Sharp & Dohme | جسم مضاد يبطل فعالية فيروس الالتهاب الرئوي البشري |
| US10434283B2 (en) * | 2015-10-29 | 2019-10-08 | Medtronic, Inc. | Interventional medical systems, associated assemblies and methods |
| WO2017087439A1 (en) | 2015-11-19 | 2017-05-26 | Covidien Lp | Optical force sensor for robotic surgical system |
| BR112018012352A2 (pt) | 2015-12-16 | 2018-12-11 | Merck Sharp & Dohme Corp. | anticorpos anti-lag3 e fragmentos de ligação ao antígeno |
| US10265068B2 (en) | 2015-12-30 | 2019-04-23 | Ethicon Llc | Surgical instruments with separable motors and motor control circuits |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US10368865B2 (en) | 2015-12-30 | 2019-08-06 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| BR112018009251A2 (pt) * | 2016-02-05 | 2019-04-09 | Board Of Regents Of The University Of Texas System | aparelho cirúrgico e controlador principal personalizado para um aparelho cirúrgico |
| BR112018016098B1 (pt) | 2016-02-09 | 2023-02-23 | Ethicon Llc | Instrumento cirúrgico |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| US20170224332A1 (en) | 2016-02-09 | 2017-08-10 | Ethicon Endo-Surgery, Llc | Surgical instruments with non-symmetrical articulation arrangements |
| US11224426B2 (en) | 2016-02-12 | 2022-01-18 | Cilag Gmbh International | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10258331B2 (en) | 2016-02-12 | 2019-04-16 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US11064997B2 (en) | 2016-04-01 | 2021-07-20 | Cilag Gmbh International | Surgical stapling instrument |
| US10617413B2 (en) | 2016-04-01 | 2020-04-14 | Ethicon Llc | Closure system arrangements for surgical cutting and stapling devices with separate and distinct firing shafts |
| WO2017173524A1 (en) | 2016-04-07 | 2017-10-12 | Titan Medical Inc. | Camera positioning method and apparatus for capturing images during a medical procedure |
| US11179150B2 (en) | 2016-04-15 | 2021-11-23 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10492783B2 (en) | 2016-04-15 | 2019-12-03 | Ethicon, Llc | Surgical instrument with improved stop/start control during a firing motion |
| US10456137B2 (en) | 2016-04-15 | 2019-10-29 | Ethicon Llc | Staple formation detection mechanisms |
| US10405859B2 (en) | 2016-04-15 | 2019-09-10 | Ethicon Llc | Surgical instrument with adjustable stop/start control during a firing motion |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US10335145B2 (en) | 2016-04-15 | 2019-07-02 | Ethicon Llc | Modular surgical instrument with configurable operating mode |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US11317917B2 (en) | 2016-04-18 | 2022-05-03 | Cilag Gmbh International | Surgical stapling system comprising a lockable firing assembly |
| US10368867B2 (en) | 2016-04-18 | 2019-08-06 | Ethicon Llc | Surgical instrument comprising a lockout |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US10820923B2 (en) * | 2016-05-16 | 2020-11-03 | Biosense Webster (Israel) Ltd. | Insertion tube with deflectable tip |
| AU2017270904A1 (en) * | 2016-05-23 | 2019-01-17 | Imperial Innovations Limited | Surgical instrument, robotic arm and control system for a robotic arm |
| CA3022149A1 (en) | 2016-05-26 | 2017-11-30 | Covidien Lp | Robotic surgical assemblies |
| WO2017205576A1 (en) | 2016-05-26 | 2017-11-30 | Covidien Lp | Instrument drive units |
| US11553984B2 (en) | 2016-06-03 | 2023-01-17 | Covidien Lp | Robotic surgical system with an embedded imager |
| US11446099B2 (en) | 2016-06-03 | 2022-09-20 | Covidien Lp | Control arm for robotic surgical systems |
| CN109275333B (zh) | 2016-06-03 | 2022-05-17 | 柯惠Lp公司 | 用于控制机器人递送操纵器的系统、方法和计算机可读程序产品 |
| WO2017210074A1 (en) | 2016-06-03 | 2017-12-07 | Covidien Lp | Passive axis system for robotic surgical systems |
| NL2016900B1 (en) | 2016-06-06 | 2017-12-13 | Fortimedix Surgical B V | Steerable instrument comprising a cylindrical diameter adaptation section |
| NL2017267B1 (en) | 2016-07-29 | 2018-02-01 | Aduro Biotech Holdings Europe B V | Anti-pd-1 antibodies |
| NL2017270B1 (en) | 2016-08-02 | 2018-02-09 | Aduro Biotech Holdings Europe B V | New anti-hCTLA-4 antibodies |
| CA3035282C (en) | 2016-08-31 | 2021-05-25 | Beijing Surgerii Technology Co., Ltd. | Flexible surgical instrument with structural bones in a crossed arrangement |
| CN106217345B (zh) * | 2016-08-31 | 2018-04-24 | 北京术锐技术有限公司 | 可实现姿态反馈的柔性连续体结构 |
| KR102257231B1 (ko) * | 2016-08-31 | 2021-06-01 | 베이징 서제리 테크놀로지 씨오., 엘티디. | 플렉시블 수술도구 시스템 |
| USD824977S1 (en) * | 2016-09-09 | 2018-08-07 | GYS Tech, LLC | Robotic arm |
| US10610345B2 (en) | 2016-09-21 | 2020-04-07 | Ethicon, Inc. | Applicator instruments for dispensing surgical fasteners having articulating shafts |
| JOP20190055A1 (ar) | 2016-09-26 | 2019-03-24 | Merck Sharp & Dohme | أجسام مضادة ضد cd27 |
| EP3522803A4 (en) | 2016-10-05 | 2020-05-27 | The University of British Columbia | INTRAMEDULAR FIXING DEVICE WITH SHAPE LOCK INTERFACE |
| CN108066010A (zh) * | 2016-11-10 | 2018-05-25 | 香港大学深圳研究院 | 一种具有柔性和多自由度的手术机器人 |
| CN110325098A (zh) | 2016-11-28 | 2019-10-11 | 适内有限责任公司 | 具有可分离一次性轴的内窥镜 |
| US10759855B2 (en) | 2016-12-02 | 2020-09-01 | Rigel Pharmaceuticals, Inc. | Antigen binding molecules to TIGIT |
| GB2557269B (en) * | 2016-12-02 | 2020-05-06 | Rolls Royce Plc | Hyper redundant robots |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| US10856868B2 (en) | 2016-12-21 | 2020-12-08 | Ethicon Llc | Firing member pin configurations |
| US10426471B2 (en) | 2016-12-21 | 2019-10-01 | Ethicon Llc | Surgical instrument with multiple failure response modes |
| US10959727B2 (en) | 2016-12-21 | 2021-03-30 | Ethicon Llc | Articulatable surgical end effector with asymmetric shaft arrangement |
| US10973516B2 (en) | 2016-12-21 | 2021-04-13 | Ethicon Llc | Surgical end effectors and adaptable firing members therefor |
| US10695055B2 (en) | 2016-12-21 | 2020-06-30 | Ethicon Llc | Firing assembly comprising a lockout |
| US10568624B2 (en) | 2016-12-21 | 2020-02-25 | Ethicon Llc | Surgical instruments with jaws that are pivotable about a fixed axis and include separate and distinct closure and firing systems |
| US11419606B2 (en) | 2016-12-21 | 2022-08-23 | Cilag Gmbh International | Shaft assembly comprising a clutch configured to adapt the output of a rotary firing member to two different systems |
| US10588631B2 (en) | 2016-12-21 | 2020-03-17 | Ethicon Llc | Surgical instruments with positive jaw opening features |
| US10918385B2 (en) | 2016-12-21 | 2021-02-16 | Ethicon Llc | Surgical system comprising a firing member rotatable into an articulation state to articulate an end effector of the surgical system |
| US11134942B2 (en) | 2016-12-21 | 2021-10-05 | Cilag Gmbh International | Surgical stapling instruments and staple-forming anvils |
| CN110099619B (zh) | 2016-12-21 | 2022-07-15 | 爱惜康有限责任公司 | 用于外科端部执行器和可替换工具组件的闭锁装置 |
| US11090048B2 (en) | 2016-12-21 | 2021-08-17 | Cilag Gmbh International | Method for resetting a fuse of a surgical instrument shaft |
| MX2019007311A (es) | 2016-12-21 | 2019-11-18 | Ethicon Llc | Sistemas de engrapado quirurgico. |
| US10682138B2 (en) | 2016-12-21 | 2020-06-16 | Ethicon Llc | Bilaterally asymmetric staple forming pocket pairs |
| US20180168625A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with smart staple cartridges |
| US20180168633A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments and staple-forming anvils |
| US10888322B2 (en) | 2016-12-21 | 2021-01-12 | Ethicon Llc | Surgical instrument comprising a cutting member |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| CA3048039A1 (en) | 2017-02-15 | 2018-08-23 | Covidien Lp | System and apparatus for crush prevention for medical robot applications |
| US10675439B2 (en) | 2017-02-21 | 2020-06-09 | Abbott Cardiovascular Systems Inc. | High torsion delivery catheter element |
| US11103992B2 (en) * | 2017-02-28 | 2021-08-31 | Canon Kabushiki Kaisha | Apparatus of continuum robot |
| WO2018176032A1 (en) * | 2017-03-24 | 2018-09-27 | Cottone Robert J | Systems and methods for tissue displacement |
| TWI796329B (zh) | 2017-04-07 | 2023-03-21 | 美商默沙東有限責任公司 | 抗-ilt4抗體及抗原結合片段 |
| SG11201908813QA (en) | 2017-04-13 | 2019-10-30 | Aduro Biotech Holdings Europe B V | Anti-sirp alpha antibodies |
| CN110650705B (zh) | 2017-05-24 | 2023-04-28 | 柯惠Lp公司 | 机器人系统中的电外科工具的存在检测 |
| EP3629980A4 (en) | 2017-05-25 | 2021-03-10 | Covidien LP | ROBOTIC SURGICAL SYSTEM WITH AUTOMATED GUIDANCE |
| JP7130003B2 (ja) | 2017-05-25 | 2022-09-02 | コヴィディエン リミテッド パートナーシップ | 画像捕捉デバイスの視野内の物体の検出のためのシステムおよび方法 |
| EP3629983B1 (en) | 2017-05-25 | 2023-06-28 | Covidien LP | Robotic surgical systems and drapes for covering components of robotic surgical systems |
| US11071554B2 (en) | 2017-06-20 | 2021-07-27 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on magnitude of velocity error measurements |
| US10813639B2 (en) | 2017-06-20 | 2020-10-27 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on system conditions |
| US11382638B2 (en) | 2017-06-20 | 2022-07-12 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified displacement distance |
| US10881396B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Surgical instrument with variable duration trigger arrangement |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US10390841B2 (en) | 2017-06-20 | 2019-08-27 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| US10368864B2 (en) | 2017-06-20 | 2019-08-06 | Ethicon Llc | Systems and methods for controlling displaying motor velocity for a surgical instrument |
| US10980537B2 (en) | 2017-06-20 | 2021-04-20 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified number of shaft rotations |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US10624633B2 (en) | 2017-06-20 | 2020-04-21 | Ethicon Llc | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument |
| US10646220B2 (en) | 2017-06-20 | 2020-05-12 | Ethicon Llc | Systems and methods for controlling displacement member velocity for a surgical instrument |
| US10327767B2 (en) | 2017-06-20 | 2019-06-25 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| USD890784S1 (en) | 2017-06-20 | 2020-07-21 | Ethicon Llc | Display panel with changeable graphical user interface |
| USD879808S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with graphical user interface |
| US11090046B2 (en) | 2017-06-20 | 2021-08-17 | Cilag Gmbh International | Systems and methods for controlling displacement member motion of a surgical stapling and cutting instrument |
| USD879809S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with changeable graphical user interface |
| US10888321B2 (en) | 2017-06-20 | 2021-01-12 | Ethicon Llc | Systems and methods for controlling velocity of a displacement member of a surgical stapling and cutting instrument |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US11357392B2 (en) | 2017-06-26 | 2022-06-14 | Ambu A/S | Bending section for an endoscope |
| US11266405B2 (en) | 2017-06-27 | 2022-03-08 | Cilag Gmbh International | Surgical anvil manufacturing methods |
| US11324503B2 (en) | 2017-06-27 | 2022-05-10 | Cilag Gmbh International | Surgical firing member arrangements |
| US20180368844A1 (en) | 2017-06-27 | 2018-12-27 | Ethicon Llc | Staple forming pocket arrangements |
| US10856869B2 (en) | 2017-06-27 | 2020-12-08 | Ethicon Llc | Surgical anvil arrangements |
| US10772629B2 (en) | 2017-06-27 | 2020-09-15 | Ethicon Llc | Surgical anvil arrangements |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| USD869655S1 (en) | 2017-06-28 | 2019-12-10 | Ethicon Llc | Surgical fastener cartridge |
| US11259805B2 (en) | 2017-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical instrument comprising firing member supports |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| USD851762S1 (en) | 2017-06-28 | 2019-06-18 | Ethicon Llc | Anvil |
| US11246592B2 (en) | 2017-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical instrument comprising an articulation system lockable to a frame |
| USD854151S1 (en) | 2017-06-28 | 2019-07-16 | Ethicon Llc | Surgical instrument shaft |
| US11478242B2 (en) | 2017-06-28 | 2022-10-25 | Cilag Gmbh International | Jaw retainer arrangement for retaining a pivotable surgical instrument jaw in pivotable retaining engagement with a second surgical instrument jaw |
| EP3420947B1 (en) | 2017-06-28 | 2022-05-25 | Cilag GmbH International | Surgical instrument comprising selectively actuatable rotatable couplers |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| US10716614B2 (en) | 2017-06-28 | 2020-07-21 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies with increased contact pressure |
| US10903685B2 (en) | 2017-06-28 | 2021-01-26 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies forming capacitive channels |
| US11484310B2 (en) | 2017-06-28 | 2022-11-01 | Cilag Gmbh International | Surgical instrument comprising a shaft including a closure tube profile |
| US10211586B2 (en) | 2017-06-28 | 2019-02-19 | Ethicon Llc | Surgical shaft assemblies with watertight housings |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| US10898183B2 (en) | 2017-06-29 | 2021-01-26 | Ethicon Llc | Robotic surgical instrument with closed loop feedback techniques for advancement of closure member during firing |
| US10398434B2 (en) | 2017-06-29 | 2019-09-03 | Ethicon Llc | Closed loop velocity control of closure member for robotic surgical instrument |
| US10258418B2 (en) | 2017-06-29 | 2019-04-16 | Ethicon Llc | System for controlling articulation forces |
| US11007022B2 (en) | 2017-06-29 | 2021-05-18 | Ethicon Llc | Closed loop velocity control techniques based on sensed tissue parameters for robotic surgical instrument |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11471155B2 (en) | 2017-08-03 | 2022-10-18 | Cilag Gmbh International | Surgical system bailout |
| US11304695B2 (en) | 2017-08-03 | 2022-04-19 | Cilag Gmbh International | Surgical system shaft interconnection |
| GB201713277D0 (en) * | 2017-08-18 | 2017-10-04 | Rolls Royce Plc | Hyper-redundant manipulators |
| JP7349992B2 (ja) | 2017-09-05 | 2023-09-25 | コヴィディエン リミテッド パートナーシップ | ロボット手術システムのための衝突処理アルゴリズム |
| US11583358B2 (en) | 2017-09-06 | 2023-02-21 | Covidien Lp | Boundary scaling of surgical robots |
| US10765429B2 (en) | 2017-09-29 | 2020-09-08 | Ethicon Llc | Systems and methods for providing alerts according to the operational state of a surgical instrument |
| USD917500S1 (en) | 2017-09-29 | 2021-04-27 | Ethicon Llc | Display screen or portion thereof with graphical user interface |
| USD907647S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US11399829B2 (en) | 2017-09-29 | 2022-08-02 | Cilag Gmbh International | Systems and methods of initiating a power shutdown mode for a surgical instrument |
| US10729501B2 (en) | 2017-09-29 | 2020-08-04 | Ethicon Llc | Systems and methods for language selection of a surgical instrument |
| US10743872B2 (en) | 2017-09-29 | 2020-08-18 | Ethicon Llc | System and methods for controlling a display of a surgical instrument |
| USD907648S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US10796471B2 (en) | 2017-09-29 | 2020-10-06 | Ethicon Llc | Systems and methods of displaying a knife position for a surgical instrument |
| JP2019093119A (ja) * | 2017-10-05 | 2019-06-20 | キヤノン ユーエスエイ, インコーポレイテッドCanon U.S.A., Inc | 複数の湾曲可能セクションを有する医療連続体ロボット |
| WO2019075090A1 (en) | 2017-10-10 | 2019-04-18 | Tilos Therapeutics, Inc. | ANTI-LAP ANTIBODIES AND USES THEREOF |
| US11134944B2 (en) | 2017-10-30 | 2021-10-05 | Cilag Gmbh International | Surgical stapler knife motion controls |
| US11090075B2 (en) | 2017-10-30 | 2021-08-17 | Cilag Gmbh International | Articulation features for surgical end effector |
| WO2019089709A1 (en) * | 2017-10-31 | 2019-05-09 | Worcester Polytechnic Institute | Robotic gripper member |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| US11865702B2 (en) | 2017-10-31 | 2024-01-09 | Worcester Polytechnic Institute | Robotic gripper member |
| US10779903B2 (en) | 2017-10-31 | 2020-09-22 | Ethicon Llc | Positive shaft rotation lock activated by jaw closure |
| WO2019094896A1 (en) | 2017-11-13 | 2019-05-16 | Vicarious Surgical Inc. | Virtual reality wrist assembly |
| KR102191482B1 (ko) | 2017-11-14 | 2020-12-15 | 주식회사 리브스메드 | 수술용 인스트루먼트의 롤 조인트 부재 |
| US11712314B2 (en) | 2017-11-15 | 2023-08-01 | Intuitive Surgical Operations, Inc. | Master control device and methods therefor |
| US11033267B2 (en) | 2017-12-15 | 2021-06-15 | Ethicon Llc | Systems and methods of controlling a clamping member firing rate of a surgical instrument |
| US11197670B2 (en) | 2017-12-15 | 2021-12-14 | Cilag Gmbh International | Surgical end effectors with pivotal jaws configured to touch at their respective distal ends when fully closed |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US10828033B2 (en) | 2017-12-15 | 2020-11-10 | Ethicon Llc | Handheld electromechanical surgical instruments with improved motor control arrangements for positioning components of an adapter coupled thereto |
| US10743874B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Sealed adapters for use with electromechanical surgical instruments |
| US10779825B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Adapters with end effector position sensing and control arrangements for use in connection with electromechanical surgical instruments |
| US10743875B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Surgical end effectors with jaw stiffener arrangements configured to permit monitoring of firing member |
| US10687813B2 (en) | 2017-12-15 | 2020-06-23 | Ethicon Llc | Adapters with firing stroke sensing arrangements for use in connection with electromechanical surgical instruments |
| US10966718B2 (en) | 2017-12-15 | 2021-04-06 | Ethicon Llc | Dynamic clamping assemblies with improved wear characteristics for use in connection with electromechanical surgical instruments |
| US11071543B2 (en) | 2017-12-15 | 2021-07-27 | Cilag Gmbh International | Surgical end effectors with clamping assemblies configured to increase jaw aperture ranges |
| US10869666B2 (en) | 2017-12-15 | 2020-12-22 | Ethicon Llc | Adapters with control systems for controlling multiple motors of an electromechanical surgical instrument |
| US11006955B2 (en) | 2017-12-15 | 2021-05-18 | Ethicon Llc | End effectors with positive jaw opening features for use with adapters for electromechanical surgical instruments |
| US11045270B2 (en) | 2017-12-19 | 2021-06-29 | Cilag Gmbh International | Robotic attachment comprising exterior drive actuator |
| US10729509B2 (en) | 2017-12-19 | 2020-08-04 | Ethicon Llc | Surgical instrument comprising closure and firing locking mechanism |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| US11020112B2 (en) | 2017-12-19 | 2021-06-01 | Ethicon Llc | Surgical tools configured for interchangeable use with different controller interfaces |
| USD910847S1 (en) | 2017-12-19 | 2021-02-16 | Ethicon Llc | Surgical instrument assembly |
| US10716565B2 (en) | 2017-12-19 | 2020-07-21 | Ethicon Llc | Surgical instruments with dual articulation drivers |
| US11311290B2 (en) | 2017-12-21 | 2022-04-26 | Cilag Gmbh International | Surgical instrument comprising an end effector dampener |
| US11129680B2 (en) | 2017-12-21 | 2021-09-28 | Cilag Gmbh International | Surgical instrument comprising a projector |
| US11076853B2 (en) | 2017-12-21 | 2021-08-03 | Cilag Gmbh International | Systems and methods of displaying a knife position during transection for a surgical instrument |
| US11179152B2 (en) | 2017-12-21 | 2021-11-23 | Cilag Gmbh International | Surgical instrument comprising a tissue grasping system |
| CN115925943A (zh) | 2017-12-27 | 2023-04-07 | 信达生物制药(苏州)有限公司 | 抗pd-l1抗体及其用途 |
| WO2019129137A1 (zh) | 2017-12-27 | 2019-07-04 | 信达生物制药(苏州)有限公司 | 抗lag-3抗体及其用途 |
| WO2019129136A1 (zh) | 2017-12-27 | 2019-07-04 | 信达生物制药(苏州)有限公司 | 抗pd-l1抗体及其用途 |
| CA3085476A1 (en) | 2018-01-04 | 2019-07-11 | Covidien Lp | Systems and assemblies for mounting a surgical accessory to robotic surgical systems, and providing access therethrough |
| USD874655S1 (en) | 2018-01-05 | 2020-02-04 | Medrobotics Corporation | Positioning arm for articulating robotic surgical system |
| EP3513706A1 (en) * | 2018-01-19 | 2019-07-24 | Ambu A/S | A method for fixation of a wire portion of an endoscope, and an endoscope |
| WO2019148412A1 (en) | 2018-02-01 | 2019-08-08 | Merck Sharp & Dohme Corp. | Anti-pd-1/lag3 bispecific antibodies |
| NL2020421B1 (en) * | 2018-02-12 | 2019-08-19 | Deam Holding B V | Surgical instrument with mechanically operable lever |
| NL2020520B1 (en) | 2018-03-02 | 2019-09-12 | Labo Bio Medical Invest B V | Multispecific binding molecules for the prevention, treatment and diagnosis of neurodegenerative disorders |
| US11189379B2 (en) | 2018-03-06 | 2021-11-30 | Digital Surgery Limited | Methods and systems for using multiple data structures to process surgical data |
| CA3090181A1 (en) | 2018-03-08 | 2019-09-12 | Covidien Lp | Surgical robotic systems |
| CN110269682B (zh) * | 2018-03-14 | 2020-09-01 | 深圳市精锋医疗科技有限公司 | 连接组件、操作臂、从操作设备及手术机器人 |
| CN108567487A (zh) * | 2018-03-23 | 2018-09-25 | 深圳市精锋医疗科技有限公司 | 具有可调节连杆的从操作设备及手术机器人 |
| WO2019204012A1 (en) | 2018-04-20 | 2019-10-24 | Covidien Lp | Compensation for observer movement in robotic surgical systems having stereoscopic displays |
| CN109927020A (zh) * | 2018-05-04 | 2019-06-25 | 上海翼人机器人有限公司 | 一种核辐射环境下遥操作六自由度机器人 |
| US11458641B2 (en) * | 2018-05-23 | 2022-10-04 | General Electric Company | Robotic arm assembly construction |
| JP7286272B2 (ja) * | 2018-06-21 | 2023-06-05 | キヤノン株式会社 | 情報処理装置、情報処理方法及びプログラム |
| WO2020009830A1 (en) | 2018-07-03 | 2020-01-09 | Covidien Lp | Systems, methods, and computer-readable media for detecting image degradation during surgical procedures |
| USD914878S1 (en) | 2018-08-20 | 2021-03-30 | Ethicon Llc | Surgical instrument anvil |
| US10842492B2 (en) | 2018-08-20 | 2020-11-24 | Ethicon Llc | Powered articulatable surgical instruments with clutching and locking arrangements for linking an articulation drive system to a firing drive system |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| US10856870B2 (en) | 2018-08-20 | 2020-12-08 | Ethicon Llc | Switching arrangements for motor powered articulatable surgical instruments |
| US11253256B2 (en) | 2018-08-20 | 2022-02-22 | Cilag Gmbh International | Articulatable motor powered surgical instruments with dedicated articulation motor arrangements |
| US11324501B2 (en) | 2018-08-20 | 2022-05-10 | Cilag Gmbh International | Surgical stapling devices with improved closure members |
| US10912559B2 (en) | 2018-08-20 | 2021-02-09 | Ethicon Llc | Reinforced deformable anvil tip for surgical stapler anvil |
| US10779821B2 (en) | 2018-08-20 | 2020-09-22 | Ethicon Llc | Surgical stapler anvils with tissue stop features configured to avoid tissue pinch |
| US11083458B2 (en) | 2018-08-20 | 2021-08-10 | Cilag Gmbh International | Powered surgical instruments with clutching arrangements to convert linear drive motions to rotary drive motions |
| US11291440B2 (en) | 2018-08-20 | 2022-04-05 | Cilag Gmbh International | Method for operating a powered articulatable surgical instrument |
| US11039834B2 (en) | 2018-08-20 | 2021-06-22 | Cilag Gmbh International | Surgical stapler anvils with staple directing protrusions and tissue stability features |
| US11045192B2 (en) | 2018-08-20 | 2021-06-29 | Cilag Gmbh International | Fabricating techniques for surgical stapler anvils |
| TW202019480A (zh) | 2018-09-13 | 2020-06-01 | 美國德州系統大學評議委員會 | 新穎lilrb4抗體及其用途 |
| WO2020068853A2 (en) | 2018-09-26 | 2020-04-02 | Auris Health, Inc. | Articulating medical instruments |
| WO2020076969A2 (en) | 2018-10-10 | 2020-04-16 | Tilos Therapeutics, Inc. | Anti-lap antibody variants and uses thereof |
| US11109746B2 (en) | 2018-10-10 | 2021-09-07 | Titan Medical Inc. | Instrument insertion system, method, and apparatus for performing medical procedures |
| US20200114528A1 (en) * | 2018-10-15 | 2020-04-16 | General Electric Company | Selectively Flexible Extension Tool |
| US11707819B2 (en) | 2018-10-15 | 2023-07-25 | General Electric Company | Selectively flexible extension tool |
| CN112912022A (zh) | 2018-10-17 | 2021-06-04 | 不列颠哥伦比亚大学 | 骨固定装置及系统 |
| US11497526B2 (en) | 2018-11-13 | 2022-11-15 | T & J Enterprises, Llc | Cervical tenaculum device |
| EP3705019A1 (en) * | 2019-03-04 | 2020-09-09 | Ambu A/S | Tip part for an endoscope |
| CN109500806B (zh) * | 2018-12-22 | 2020-09-29 | 上海交通大学 | 一种多自由度多通道辅助操作柔性机械臂系统 |
| US11234783B2 (en) | 2018-12-28 | 2022-02-01 | Titan Medical Inc. | Articulated tool positioner for robotic surgery system |
| US11586106B2 (en) | 2018-12-28 | 2023-02-21 | Titan Medical Inc. | Imaging apparatus having configurable stereoscopic perspective |
| US11702955B2 (en) | 2019-01-14 | 2023-07-18 | General Electric Company | Component repair system and method |
| IT201900001185A1 (it) * | 2019-01-28 | 2020-07-28 | Univ Degli Studi Di Napoli Federico Ii | Dispositivo di ausilio per interventi chirurgici, in particolare interventi a minima invasivita’ |
| US11717355B2 (en) | 2019-01-29 | 2023-08-08 | Covidien Lp | Drive mechanisms for surgical instruments such as for use in robotic surgical systems |
| US11576733B2 (en) | 2019-02-06 | 2023-02-14 | Covidien Lp | Robotic surgical assemblies including electrosurgical instruments having articulatable wrist assemblies |
| US11484372B2 (en) | 2019-02-15 | 2022-11-01 | Covidien Lp | Articulation mechanisms for surgical instruments such as for use in robotic surgical systems |
| US11172929B2 (en) | 2019-03-25 | 2021-11-16 | Cilag Gmbh International | Articulation drive arrangements for surgical systems |
| US11147553B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11147551B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11253254B2 (en) | 2019-04-30 | 2022-02-22 | Cilag Gmbh International | Shaft rotation actuator on a surgical instrument |
| US11471157B2 (en) | 2019-04-30 | 2022-10-18 | Cilag Gmbh International | Articulation control mapping for a surgical instrument |
| US11452528B2 (en) | 2019-04-30 | 2022-09-27 | Cilag Gmbh International | Articulation actuators for a surgical instrument |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11426251B2 (en) | 2019-04-30 | 2022-08-30 | Cilag Gmbh International | Articulation directional lights on a surgical instrument |
| US11432816B2 (en) | 2019-04-30 | 2022-09-06 | Cilag Gmbh International | Articulation pin for a surgical instrument |
| US11648009B2 (en) | 2019-04-30 | 2023-05-16 | Cilag Gmbh International | Rotatable jaw tip for a surgical instrument |
| US11123146B2 (en) | 2019-05-30 | 2021-09-21 | Titan Medical Inc. | Surgical instrument apparatus, actuator, and drive |
| US11219455B2 (en) | 2019-06-28 | 2022-01-11 | Cilag Gmbh International | Surgical instrument including a lockout key |
| US11298132B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Inlernational | Staple cartridge including a honeycomb extension |
| US11464601B2 (en) | 2019-06-28 | 2022-10-11 | Cilag Gmbh International | Surgical instrument comprising an RFID system for tracking a movable component |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US11224497B2 (en) | 2019-06-28 | 2022-01-18 | Cilag Gmbh International | Surgical systems with multiple RFID tags |
| US11298127B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Interational | Surgical stapling system having a lockout mechanism for an incompatible cartridge |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11259803B2 (en) | 2019-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling system having an information encryption protocol |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11523822B2 (en) | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| US11350938B2 (en) | 2019-06-28 | 2022-06-07 | Cilag Gmbh International | Surgical instrument comprising an aligned rfid sensor |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11399837B2 (en) | 2019-06-28 | 2022-08-02 | Cilag Gmbh International | Mechanisms for motor control adjustments of a motorized surgical instrument |
| US11291451B2 (en) | 2019-06-28 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with battery compatibility verification functionality |
| US11497492B2 (en) | 2019-06-28 | 2022-11-15 | Cilag Gmbh International | Surgical instrument including an articulation lock |
| US11426167B2 (en) | 2019-06-28 | 2022-08-30 | Cilag Gmbh International | Mechanisms for proper anvil attachment surgical stapling head assembly |
| US11246678B2 (en) | 2019-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical stapling system having a frangible RFID tag |
| US11376098B2 (en) | 2019-06-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument system comprising an RFID system |
| US11478241B2 (en) | 2019-06-28 | 2022-10-25 | Cilag Gmbh International | Staple cartridge including projections |
| US11051807B2 (en) | 2019-06-28 | 2021-07-06 | Cilag Gmbh International | Packaging assembly including a particulate trap |
| EP3797671A1 (en) | 2019-09-26 | 2021-03-31 | Ambu A/S | A tip part for an endoscope and the manufacture thereof |
| WO2021059238A1 (en) * | 2019-09-27 | 2021-04-01 | Auris Health, Inc. | Robotically-actuated medical retractors |
| CN110694286B (zh) * | 2019-11-05 | 2020-11-10 | 厦门大学 | 一种使用机械臂模拟掌中木偶表演的方法 |
| CN110936362B (zh) * | 2019-11-06 | 2022-11-29 | 中山大学 | 绳索同步联动的串联操作臂装置 |
| US11607219B2 (en) | 2019-12-19 | 2023-03-21 | Cilag Gmbh International | Staple cartridge comprising a detachable tissue cutting knife |
| US11529139B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Motor driven surgical instrument |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11234698B2 (en) | 2019-12-19 | 2022-02-01 | Cilag Gmbh International | Stapling system comprising a clamp lockout and a firing lockout |
| US11446029B2 (en) | 2019-12-19 | 2022-09-20 | Cilag Gmbh International | Staple cartridge comprising projections extending from a curved deck surface |
| US11304696B2 (en) | 2019-12-19 | 2022-04-19 | Cilag Gmbh International | Surgical instrument comprising a powered articulation system |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11504122B2 (en) | 2019-12-19 | 2022-11-22 | Cilag Gmbh International | Surgical instrument comprising a nested firing member |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| US11291447B2 (en) | 2019-12-19 | 2022-04-05 | Cilag Gmbh International | Stapling instrument comprising independent jaw closing and staple firing systems |
| US11931033B2 (en) | 2019-12-19 | 2024-03-19 | Cilag Gmbh International | Staple cartridge comprising a latch lockout |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11464512B2 (en) | 2019-12-19 | 2022-10-11 | Cilag Gmbh International | Staple cartridge comprising a curved deck surface |
| USD1018844S1 (en) | 2020-01-09 | 2024-03-19 | Adaptivendo Llc | Endoscope handle |
| US11752622B2 (en) | 2020-01-23 | 2023-09-12 | General Electric Company | Extension tool having a plurality of links |
| US11692650B2 (en) | 2020-01-23 | 2023-07-04 | General Electric Company | Selectively flexible extension tool |
| US11613003B2 (en) * | 2020-01-24 | 2023-03-28 | General Electric Company | Line assembly for an extension tool having a plurality of links |
| US11596467B2 (en) * | 2020-02-04 | 2023-03-07 | Covidien Lp | Articulating tip for bipolar pencil |
| US11371437B2 (en) | 2020-03-10 | 2022-06-28 | Oliver Crispin Robotics Limited | Insertion tool |
| EP4132971A1 (en) | 2020-04-09 | 2023-02-15 | Merck Sharp & Dohme LLC | Affinity matured anti-lap antibodies and uses thereof |
| EP4143227A2 (en) | 2020-04-30 | 2023-03-08 | Sairopa B.V. | Anti-cd103 antibodies |
| CN111803216B (zh) * | 2020-05-28 | 2023-06-02 | 中国科学院自动化研究所 | 一种支气管手术机器人及支气管手术系统 |
| CN111716341B (zh) * | 2020-06-01 | 2021-05-11 | 大连理工大学 | 一种磁致变刚度软体机器人驱动模块及其制造方法 |
| USD967421S1 (en) | 2020-06-02 | 2022-10-18 | Cilag Gmbh International | Staple cartridge |
| USD976401S1 (en) | 2020-06-02 | 2023-01-24 | Cilag Gmbh International | Staple cartridge |
| EP4157113A1 (en) | 2020-06-02 | 2023-04-05 | Flexdex, Inc. | Surgical tool and assembly |
| USD974560S1 (en) | 2020-06-02 | 2023-01-03 | Cilag Gmbh International | Staple cartridge |
| USD975278S1 (en) | 2020-06-02 | 2023-01-10 | Cilag Gmbh International | Staple cartridge |
| USD975851S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD975850S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD966512S1 (en) | 2020-06-02 | 2022-10-11 | Cilag Gmbh International | Staple cartridge |
| EP4167892A1 (en) | 2020-06-19 | 2023-04-26 | Remedy Robotics, Inc. | Systems and methods for guidance of intraluminal devices within the vasculature |
| PE20230840A1 (es) | 2020-06-25 | 2023-05-19 | Merck Sharp And Dohme Llc | Anticuerpos de alta afinidad dirigidos a tau fosforilada en la serina 413 |
| CN111796415A (zh) * | 2020-07-02 | 2020-10-20 | 瑞泰生医科技股份有限公司 | 弯曲管体及内窥镜 |
| CN111702802B (zh) * | 2020-07-10 | 2022-03-22 | 浙江理工大学 | 一种夹爪及应用该夹爪的夹具 |
| USD963851S1 (en) | 2020-07-10 | 2022-09-13 | Covidien Lp | Port apparatus |
| US20220016394A1 (en) * | 2020-07-16 | 2022-01-20 | Canon U.S.A., Inc. | Medical Apparatus and Method of Use Thereof |
| KR102279668B1 (ko) * | 2020-07-17 | 2021-07-20 | 재단법인 대구경북첨단의료산업진흥재단 | 다중 로봇관절 와이어 연결구조 |
| US20220031320A1 (en) | 2020-07-28 | 2022-02-03 | Cilag Gmbh International | Surgical instruments with flexible firing member actuator constraint arrangements |
| AU2021347967A1 (en) | 2020-09-24 | 2023-06-01 | Merck Sharp & Dohme Llc | Stable formulations of programmed death receptor 1 (pd-1) antibodies and hyaluronidase variants and fragments thereof and methods of use thereof |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| US11517390B2 (en) | 2020-10-29 | 2022-12-06 | Cilag Gmbh International | Surgical instrument comprising a limited travel switch |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| US11452526B2 (en) | 2020-10-29 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising a staged voltage regulation start-up system |
| US11534259B2 (en) | 2020-10-29 | 2022-12-27 | Cilag Gmbh International | Surgical instrument comprising an articulation indicator |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| USD980425S1 (en) | 2020-10-29 | 2023-03-07 | Cilag Gmbh International | Surgical instrument assembly |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| JP2022073298A (ja) * | 2020-10-30 | 2022-05-17 | 日本発條株式会社 | 屈曲操作機構 |
| CN116600727A (zh) * | 2020-11-30 | 2023-08-15 | 富士胶片株式会社 | 内窥镜处置器具、内窥镜装置及处置方法 |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11678882B2 (en) | 2020-12-02 | 2023-06-20 | Cilag Gmbh International | Surgical instruments with interactive features to remedy incidental sled movements |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| CN112603392B (zh) * | 2020-12-29 | 2022-07-19 | 极限人工智能有限公司 | 一种手术器械 |
| DE102021101766B4 (de) | 2021-01-27 | 2023-01-12 | Karl Storz Se & Co. Kg | Medizinisches Instrument und Betätigungseinheit für ein medizinisches Instrument |
| WO2022165001A1 (en) | 2021-01-29 | 2022-08-04 | Merck Sharp & Dohme Llc | Compositions of programmed death receptor 1 (pd-1) antibodies and methods of obtaining the compositions thereof |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11944336B2 (en) * | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11654547B2 (en) | 2021-03-31 | 2023-05-23 | General Electric Company | Extension tool |
| CN113199461B (zh) * | 2021-05-24 | 2022-12-27 | 山东大学 | 一种基于柔性连续体的建筑作业机械臂及辅助作业装置 |
| US11948226B2 (en) | 2021-05-28 | 2024-04-02 | Covidien Lp | Systems and methods for clinical workspace simulation |
| US11826047B2 (en) | 2021-05-28 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising jaw mounts |
| WO2023278789A1 (en) | 2021-07-01 | 2023-01-05 | Remedy Robotics, Inc. | Vision-based position and orientation determination for endovascular tools |
| US11707332B2 (en) | 2021-07-01 | 2023-07-25 | Remedy Robotics, Inc. | Image space control for endovascular tools |
| US11864746B2 (en) * | 2021-07-21 | 2024-01-09 | Terumo Cardiovascular Systems Corporation | Articulating stabilizer arm with disposable and reusable subassemblies |
| DE102021119618B4 (de) * | 2021-07-28 | 2023-02-23 | Karl Storz Se & Co. Kg | Eingabeeinheit für ein medizinisches Instrument sowie medizinisches System mit einer Eingabeeinheit |
| DE102021119506A1 (de) | 2021-07-28 | 2023-02-02 | Karl Storz Se & Co. Kg | Verfahren zum Befestigen von Lenkelementen an einer räumlich verstellbaren Scheibe, Lenkelemente zum Bewegen einer distalseitigen Gelenkmechanik und medizinisches Instrument |
| US11278303B1 (en) * | 2021-07-29 | 2022-03-22 | Vita Solutions LLC | Minimally invasive surgical devices, systems, and methods |
| US11877745B2 (en) | 2021-10-18 | 2024-01-23 | Cilag Gmbh International | Surgical stapling assembly having longitudinally-repeating staple leg clusters |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| US20240074744A1 (en) * | 2022-09-04 | 2024-03-07 | Flexbar Machine Corp. | Retraction device for minimally invasive surgery |
| CN115958627B (zh) * | 2022-12-20 | 2023-06-23 | 湖北省肿瘤医院(湖北省肿瘤研究所) | 一种智慧型病房的桁架结构机械臂及使用方法 |
Family Cites Families (204)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US574534A (en) * | 1897-01-05 | Turkey caller and gobbler | ||
| US1820463A (en) * | 1931-04-30 | 1931-08-25 | Otto G Klein | Clinker tongs |
| US3060972A (en) | 1957-08-22 | 1962-10-30 | Bausch & Lomb | Flexible tube structures |
| US3071161A (en) * | 1960-05-16 | 1963-01-01 | Bausch & Lomb | Bidirectionally flexible segmented tube |
| US3190286A (en) | 1961-10-31 | 1965-06-22 | Bausch & Lomb | Flexible viewing probe for endoscopic use |
| US3557780A (en) | 1967-04-20 | 1971-01-26 | Olympus Optical Co | Mechanism for controlling flexure of endoscope |
| US3605725A (en) * | 1968-08-07 | 1971-09-20 | Medi Tech Inc | Controlled motion devices |
| FR2416094A1 (fr) * | 1978-02-01 | 1979-08-31 | Zarudiansky Alain | Dispositif de manipulation a distance |
| US4246661A (en) * | 1979-03-15 | 1981-01-27 | The Boeing Company | Digitally-controlled artificial hand |
| JPS57123101U (zh) | 1980-09-10 | 1982-07-31 | ||
| DE3048021A1 (de) * | 1980-12-19 | 1982-07-15 | Bayer Ag, 5090 Leverkusen | Insektizide und akarizide mittel und ihre verwendung |
| JPS5920946Y2 (ja) * | 1981-05-30 | 1984-06-18 | 株式会社トミー | ロボツトハンド玩具 |
| FR2512721A1 (fr) * | 1981-09-14 | 1983-03-18 | Automatique Indle | Dispositif universel de supportage et de bridage d'une piece |
| US4489826A (en) | 1982-02-05 | 1984-12-25 | Philip Dubson | Adjustable apparatus |
| US4921293A (en) * | 1982-04-02 | 1990-05-01 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Multi-fingered robotic hand |
| JPS5953188A (ja) | 1982-09-22 | 1984-03-27 | 株式会社日立製作所 | 多関節マニピユレ−タ |
| US4551061A (en) | 1983-04-18 | 1985-11-05 | Olenick Ralph W | Flexible, extensible robot arm |
| GB8413058D0 (en) | 1984-05-22 | 1984-06-27 | Minvade Ltd | Endoscopes |
| US4580551A (en) | 1984-11-02 | 1986-04-08 | Warner-Lambert Technologies, Inc. | Flexible plastic tube for endoscopes and the like |
| US4834761A (en) | 1985-05-09 | 1989-05-30 | Walters David A | Robotic multiple-jointed digit control system |
| US4700693A (en) | 1985-12-09 | 1987-10-20 | Welch Allyn, Inc. | Endoscope steering section |
| US4763669A (en) * | 1986-01-09 | 1988-08-16 | Jaeger John C | Surgical instrument with adjustable angle of operation |
| US4838859A (en) * | 1987-05-19 | 1989-06-13 | Steve Strassmann | Steerable catheter |
| US4790294A (en) | 1987-07-28 | 1988-12-13 | Welch Allyn, Inc. | Ball-and-socket bead endoscope steering section |
| IT1235460B (it) | 1987-07-31 | 1992-07-30 | Confida Spa | Endoscopio flessibile. |
| US4984951A (en) * | 1988-01-20 | 1991-01-15 | The Board Of Trustees Of The Leland Stanford Junior University | Mechanical prehensor |
| US4854626A (en) * | 1988-01-26 | 1989-08-08 | Duke Roger S | Fish retrieving tool |
| JPH01299768A (ja) | 1988-05-24 | 1989-12-04 | Nippon Steel Corp | 消耗電極式矩形波交流アーク溶接方法 |
| US4880015A (en) | 1988-06-03 | 1989-11-14 | Nierman David M | Biopsy forceps |
| GB2226245A (en) | 1988-11-18 | 1990-06-27 | Alan Crockard | Endoscope, remote actuator and aneurysm clip applicator. |
| JPH0360621A (ja) | 1989-07-31 | 1991-03-15 | Toshiba Corp | 内視鏡プローブ |
| US4984626A (en) * | 1989-11-24 | 1991-01-15 | Carrier Corporation | Embossed vortex generator enhanced plate fin |
| US5158086A (en) * | 1990-07-20 | 1992-10-27 | W. L. Gore & Associates, Inc. | Invasive probe system |
| JPH0817768B2 (ja) | 1990-11-06 | 1996-02-28 | 富士写真光機株式会社 | 内視鏡 |
| US5209747A (en) * | 1990-12-13 | 1993-05-11 | Knoepfler Dennis J | Adjustable angle medical forceps |
| AU660444B2 (en) | 1991-02-15 | 1995-06-29 | Ingemar H. Lundquist | Torquable catheter and method |
| US5354162A (en) * | 1991-02-26 | 1994-10-11 | Rutgers University | Actuator system for providing force feedback to portable master support |
| US5143505A (en) * | 1991-02-26 | 1992-09-01 | Rutgers University | Actuator system for providing force feedback to a dextrous master glove |
| US5373747A (en) * | 1991-03-30 | 1994-12-20 | Kabushiki Kaisha Toshiba | Robot hand and robot |
| US5251611A (en) * | 1991-05-07 | 1993-10-12 | Zehel Wendell E | Method and apparatus for conducting exploratory procedures |
| US5490819A (en) * | 1991-08-05 | 1996-02-13 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| US5476479A (en) | 1991-09-26 | 1995-12-19 | United States Surgical Corporation | Handle for endoscopic surgical instruments and jaw structure |
| US6250532B1 (en) | 1991-10-18 | 2001-06-26 | United States Surgical Corporation | Surgical stapling apparatus |
| US5271381A (en) | 1991-11-18 | 1993-12-21 | Vision Sciences, Inc. | Vertebrae for a bending section of an endoscope |
| WO1993013704A1 (en) * | 1992-01-09 | 1993-07-22 | Endomedix Corporation | Bi-directional miniscope |
| US5273026A (en) | 1992-03-06 | 1993-12-28 | Wilk Peter J | Retractor and associated method for use in laparoscopic surgery |
| US5314424A (en) * | 1992-04-06 | 1994-05-24 | United States Surgical Corporation | Surgical instrument locking mechanism |
| WO1993020878A1 (en) * | 1992-04-10 | 1993-10-28 | Cardiorhythm | Shapable handle for steerable electrode catheter |
| US5417203A (en) * | 1992-04-23 | 1995-05-23 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| US5325845A (en) | 1992-06-08 | 1994-07-05 | Adair Edwin Lloyd | Steerable sheath for use with selected removable optical catheter |
| US5297443A (en) | 1992-07-07 | 1994-03-29 | Wentz John D | Flexible positioning appendage |
| US5330502A (en) * | 1992-10-09 | 1994-07-19 | Ethicon, Inc. | Rotational endoscopic mechanism with jointed drive mechanism |
| US5346504A (en) * | 1992-11-19 | 1994-09-13 | Ethicon, Inc. | Intraluminal manipulator with a head having articulating links |
| US5286228A (en) * | 1992-11-23 | 1994-02-15 | C. J. Associates, Ltd. | Toy mechanical hand |
| CA2114330A1 (en) * | 1993-01-29 | 1994-07-30 | Smith & Nephew Endoscopy, Inc. | Rotatable curved instrument |
| US6161543A (en) | 1993-02-22 | 2000-12-19 | Epicor, Inc. | Methods of epicardial ablation for creating a lesion around the pulmonary veins |
| US5643294A (en) * | 1993-03-01 | 1997-07-01 | United States Surgical Corporation | Surgical apparatus having an increased range of operability |
| DE4326618C2 (de) * | 1993-03-04 | 1995-05-18 | Wolfgang Daum Medizintechnik | Manipulatorhand |
| DE4306786C1 (de) * | 1993-03-04 | 1994-02-10 | Wolfgang Daum | Chirurgischer Manipulator |
| US5647743A (en) * | 1993-05-11 | 1997-07-15 | Schmitt; Friedrich | Device for treating jaw fractures or tooth displacements |
| JP3432884B2 (ja) | 1993-05-12 | 2003-08-04 | オリンパス光学工業株式会社 | 内視鏡 |
| US5498256A (en) * | 1993-05-28 | 1996-03-12 | Snowden-Pencer, Inc. | Surgical instrument handle |
| US5486154A (en) * | 1993-06-08 | 1996-01-23 | Kelleher; Brian S. | Endoscope |
| US5827323A (en) * | 1993-07-21 | 1998-10-27 | Charles H. Klieman | Surgical instrument for endoscopic and general surgery |
| US5513827A (en) * | 1993-07-26 | 1996-05-07 | Karlin Technology, Inc. | Gooseneck surgical instrument holder |
| US5441494A (en) * | 1993-07-29 | 1995-08-15 | Ethicon, Inc. | Manipulable hand for laparoscopy |
| US5405344A (en) * | 1993-09-30 | 1995-04-11 | Ethicon, Inc. | Articulable socket joint assembly for an endoscopic instrument for surgical fastner track therefor |
| US5625576A (en) * | 1993-10-01 | 1997-04-29 | Massachusetts Institute Of Technology | Force reflecting haptic interface |
| IT1264718B1 (it) * | 1993-10-08 | 1996-10-04 | Scuola Superiore Di Studi Universitari E Di Perfezionamento Sant Anna | Dispositivo atto a fornire una retroazione di forza ad un'unita' fisiologica, da utilizzarsi in particolare come interfaccia avanzata |
| DE4340707C2 (de) * | 1993-11-30 | 1997-03-27 | Wolf Gmbh Richard | Manipulator |
| US5405244A (en) * | 1993-12-17 | 1995-04-11 | Solar Turbines Incorporated | Ceramic blade attachment system |
| US5628740A (en) | 1993-12-23 | 1997-05-13 | Mullane; Thomas S. | Articulating toggle bolt bone screw |
| DE4411099C2 (de) * | 1994-03-30 | 1998-07-30 | Wolf Gmbh Richard | Chirurgisches Instrument |
| USRE38335E1 (en) | 1994-05-24 | 2003-11-25 | Endius Incorporated | Surgical instrument |
| US5454827A (en) * | 1994-05-24 | 1995-10-03 | Aust; Gilbert M. | Surgical instrument |
| US5807376A (en) * | 1994-06-24 | 1998-09-15 | United States Surgical Corporation | Apparatus and method for performing surgical tasks during laparoscopic procedures |
| US5609601A (en) | 1994-09-23 | 1997-03-11 | United States Surgical Corporation | Endoscopic surgical apparatus with rotation lock |
| US5549636A (en) * | 1994-10-05 | 1996-08-27 | Li Medical Technologies Inc. | Surgical grasper with articulated fingers |
| US5522788A (en) | 1994-10-26 | 1996-06-04 | Kuzmak; Lubomyr I. | Finger-like laparoscopic blunt dissector device |
| US5713505A (en) * | 1996-05-13 | 1998-02-03 | Ethicon Endo-Surgery, Inc. | Articulation transmission mechanism for surgical instruments |
| US5632432A (en) | 1994-12-19 | 1997-05-27 | Ethicon Endo-Surgery, Inc. | Surgical instrument |
| US5704534A (en) | 1994-12-19 | 1998-01-06 | Ethicon Endo-Surgery, Inc. | Articulation assembly for surgical instruments |
| US5792164A (en) * | 1994-12-19 | 1998-08-11 | Lakatos; Nick | Surgical instrument |
| US5904697A (en) | 1995-02-24 | 1999-05-18 | Heartport, Inc. | Devices and methods for performing a vascular anastomosis |
| US5759151A (en) | 1995-06-07 | 1998-06-02 | Carnegie Mellon University | Flexible steerable device for conducting exploratory procedures |
| EP0955860A1 (en) | 1995-06-07 | 1999-11-17 | Robert T. Chilcoat | Articulated endospcope with specific advantages for laryngoscopy |
| US5570919A (en) * | 1995-06-26 | 1996-11-05 | Eusebe; Frantz-Lee | Remote grapple |
| AU6480096A (en) * | 1995-06-30 | 1997-02-05 | Ross-Hime Designs, Inc. | Robotic manipulator |
| IT1277690B1 (it) | 1995-12-22 | 1997-11-11 | Bieffe Medital Spa | Sistema di sostegno ed attuazione a vertebre in particolare per strumenti chirurgici e diagnostici |
| US5624398A (en) * | 1996-02-08 | 1997-04-29 | Symbiosis Corporation | Endoscopic robotic surgical tools and methods |
| US5626608A (en) | 1996-03-29 | 1997-05-06 | United States Surgical Corporation | Surgical instrument having locking handle |
| US5823066A (en) | 1996-05-13 | 1998-10-20 | Ethicon Endo-Surgery, Inc. | Articulation transmission mechanism for surgical instruments |
| US5899428A (en) * | 1996-06-06 | 1999-05-04 | Lear Corporation | Vehicle power seat adjuster with self-locking track assemblies |
| US5702408A (en) | 1996-07-17 | 1997-12-30 | Ethicon Endo-Surgery, Inc. | Articulating surgical instrument |
| US5851208A (en) | 1996-10-15 | 1998-12-22 | Linvatec Corporation | Rotatable surgical burr |
| US6110130A (en) * | 1997-04-21 | 2000-08-29 | Virtual Technologies, Inc. | Exoskeleton device for directly measuring fingertip position and inferring finger joint angle |
| WO1998049944A1 (en) | 1997-05-02 | 1998-11-12 | Pilling Weck Incorporated | Adjustable supporting bracket having plural ball and socket joints |
| US5873817A (en) | 1997-05-12 | 1999-02-23 | Circon Corporation | Endoscope with resilient deflectable section |
| US6042555A (en) * | 1997-05-12 | 2000-03-28 | Virtual Technologies, Inc. | Force-feedback interface device for the hand |
| US5938678A (en) | 1997-06-11 | 1999-08-17 | Endius Incorporated | Surgical instrument |
| US5921856A (en) * | 1997-07-10 | 1999-07-13 | Sp3, Inc. | CVD diamond coated substrate for polishing pad conditioning head and method for making same |
| US6280458B1 (en) | 1997-07-22 | 2001-08-28 | Karl Storz Gmbh & Co. Kg | Surgical grasping and holding forceps |
| US5961532A (en) | 1997-08-29 | 1999-10-05 | Stryker Corporation | Surgical tool having flexible tubular inner member movable for tissue working |
| US6019722A (en) | 1997-09-17 | 2000-02-01 | Guidant Corporation | Device to permit offpump beating heart coronary bypass surgery |
| US5916147A (en) | 1997-09-22 | 1999-06-29 | Boury; Harb N. | Selectively manipulable catheter |
| US5921956A (en) | 1997-09-24 | 1999-07-13 | Smith & Nephew, Inc. | Surgical instrument |
| US5947984A (en) * | 1997-10-10 | 1999-09-07 | Ethicon Endo-Surger, Inc. | Ultrasonic clamp coagulator apparatus having force limiting clamping mechanism |
| DE19745157A1 (de) * | 1997-10-14 | 1999-06-10 | Storz Karl Gmbh & Co | Instrument bzw. Zange für medizinische und inbesondere endoskopische Anwendungen |
| US6050996A (en) | 1997-11-12 | 2000-04-18 | Sherwood Services Ag | Bipolar electrosurgical instrument with replaceable electrodes |
| US7169141B2 (en) | 1998-02-24 | 2007-01-30 | Hansen Medical, Inc. | Surgical instrument |
| DE10010931A1 (de) | 2000-03-06 | 2001-09-13 | Stm Medtech Starnberg | Endoskopschaft |
| US6398726B1 (en) | 1998-11-20 | 2002-06-04 | Intuitive Surgical, Inc. | Stabilizer for robotic beating-heart surgery |
| JP2000193893A (ja) | 1998-12-28 | 2000-07-14 | Suzuki Motor Corp | 検査用挿入管の屈曲装置 |
| US6491626B1 (en) | 1999-04-16 | 2002-12-10 | Nuvasive | Articulation systems for positioning minimally invasive surgical tools |
| US6482149B1 (en) | 1999-05-12 | 2002-11-19 | Fuji Photo Optical Co., Ltd. | Curved part of endoscope |
| US7637905B2 (en) | 2003-01-15 | 2009-12-29 | Usgi Medical, Inc. | Endoluminal tool deployment system |
| FR2795301B1 (fr) | 1999-06-25 | 2001-08-31 | Prec | Instrument de chirurgie endoscopique |
| NL1012790C2 (nl) | 1999-08-06 | 2001-02-07 | Univ Delft Tech | Endoscoop. |
| US6506149B2 (en) * | 1999-09-07 | 2003-01-14 | Origin Medsystems, Inc. | Organ manipulator having suction member supported with freedom to move relative to its support |
| ATE363235T1 (de) | 1999-09-09 | 2007-06-15 | Tuebingen Scient Medical Gmbh | Chirurgisches instrument für minimal invasive eingriffe |
| US6761171B2 (en) * | 1999-09-27 | 2004-07-13 | Andrew J. Toti | Endotracheal tube with tip directional control and position preserving mechanism |
| US6817972B2 (en) | 1999-10-01 | 2004-11-16 | Computer Motion, Inc. | Heart stabilizer |
| US6325811B1 (en) | 1999-10-05 | 2001-12-04 | Ethicon Endo-Surgery, Inc. | Blades with functional balance asymmetries for use with ultrasonic surgical instruments |
| US6749560B1 (en) | 1999-10-26 | 2004-06-15 | Circon Corporation | Endoscope shaft with slotted tube |
| JP3765218B2 (ja) * | 2000-02-03 | 2006-04-12 | フジノン株式会社 | 内視鏡の操作ワイヤガイド装置 |
| JP3736269B2 (ja) * | 2000-03-23 | 2006-01-18 | フジノン株式会社 | 内視鏡の軟性部−アングル部連結構造 |
| US6858005B2 (en) | 2000-04-03 | 2005-02-22 | Neo Guide Systems, Inc. | Tendon-driven endoscope and methods of insertion |
| US6837846B2 (en) | 2000-04-03 | 2005-01-04 | Neo Guide Systems, Inc. | Endoscope having a guide tube |
| US6471696B1 (en) | 2000-04-12 | 2002-10-29 | Afx, Inc. | Microwave ablation instrument with a directional radiation pattern |
| CA2406522C (fr) | 2000-04-21 | 2009-07-14 | Universite Pierre Et Marie Curie (Paris Vi) | Dispositif de positionnement, d'exploration et/ou d'intervention notamment dans le domaine de l'endoscopie et/ou de la chirurgie mini-invasive |
| JP3791893B2 (ja) | 2000-04-27 | 2006-06-28 | オリンパス株式会社 | 外科用処置具 |
| DE50110915D1 (de) * | 2000-05-16 | 2006-10-19 | Storz Endoskop Gmbh | Austauschbarer Werkzeugeinsatz für ein endoskopisches Bearbeitungsgerät und derartiges endoskopisches Bearbeitungsgerät |
| TW447424U (en) * | 2000-05-16 | 2001-07-21 | Formosa Saint Jose Corp | Retaining device for sled capable of adjusting position |
| US6743239B1 (en) * | 2000-05-25 | 2004-06-01 | St. Jude Medical, Inc. | Devices with a bendable tip for medical procedures |
| US6645196B1 (en) | 2000-06-16 | 2003-11-11 | Intuitive Surgical, Inc. | Guided tool change |
| US7138976B1 (en) * | 2000-07-13 | 2006-11-21 | Rutgers, The State University Of New Jersey | Hand force feedback and sensing system |
| EP1309277B1 (en) * | 2000-07-20 | 2008-05-28 | Kinetic Surgical, LLC | Hand-actuated articulating surgical tool |
| NL1018282C1 (nl) | 2000-07-24 | 2002-01-25 | Univ Delft Tech | Endoscoop. |
| US6902560B1 (en) | 2000-07-27 | 2005-06-07 | Intuitive Surgical, Inc. | Roll-pitch-roll surgical tool |
| US6746443B1 (en) | 2000-07-27 | 2004-06-08 | Intuitive Surgical Inc. | Roll-pitch-roll surgical tool |
| JP2002078674A (ja) | 2000-09-08 | 2002-03-19 | Fuji Photo Optical Co Ltd | 内視鏡の湾曲部構造 |
| US6571042B1 (en) * | 2000-09-26 | 2003-05-27 | Tyco Telecommunications (Us) Inc. | Multi-body modular repeater system and articulated housing for use therewith |
| JP2002177201A (ja) * | 2000-10-02 | 2002-06-25 | Olympus Optical Co Ltd | 内視鏡 |
| US6716226B2 (en) | 2001-06-25 | 2004-04-06 | Inscope Development, Llc | Surgical clip |
| DE10100533A1 (de) | 2001-01-09 | 2002-07-18 | Xion Gmbh | Endoskopartige Vorrichtung, insbesondere für die Notfallintubation |
| US20030135204A1 (en) | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| US20030073939A1 (en) * | 2001-02-23 | 2003-04-17 | Taylor Robin L. | Continuous passive motion apparatus |
| DE10110106B4 (de) * | 2001-03-02 | 2007-08-02 | Richard Wolf Gmbh | Chirurgische Zange |
| US6882876B2 (en) * | 2001-03-27 | 2005-04-19 | Cornell Research Foundation, Inc. | Diagnosis of normal pressure hydrocephalus by automated processing of MR images |
| US6774597B1 (en) * | 2001-03-30 | 2004-08-10 | The Regents Of The University Of Michigan | Apparatus for obstacle traversion |
| DE60218240T2 (de) | 2001-04-18 | 2007-11-22 | Olympus Corporation | Chirurgisches Instrument |
| US6676676B2 (en) | 2001-05-02 | 2004-01-13 | Novare Surgical Systems | Clamp having bendable shaft |
| US6544274B2 (en) | 2001-05-02 | 2003-04-08 | Novare Surgical Systems, Inc. | Clamp having bendable shaft |
| US7335467B2 (en) * | 2001-05-15 | 2008-02-26 | Ludwig Institute For Cancer Research | Breast cancer antigens |
| GB0114406D0 (en) | 2001-06-13 | 2001-08-08 | Oliver Crispin Consulting Ltd | Improvements in and relating to robotic arms |
| US20060199999A1 (en) * | 2001-06-29 | 2006-09-07 | Intuitive Surgical Inc. | Cardiac tissue ablation instrument with flexible wrist |
| US6817974B2 (en) | 2001-06-29 | 2004-11-16 | Intuitive Surgical, Inc. | Surgical tool having positively positionable tendon-actuated multi-disk wrist joint |
| US6939350B2 (en) | 2001-10-22 | 2005-09-06 | Boston Scientific Scimed, Inc. | Apparatus for supporting diagnostic and therapeutic elements in contact with tissue including electrode cooling device |
| US6723087B2 (en) * | 2001-12-14 | 2004-04-20 | Medtronic, Inc. | Apparatus and method for performing surgery on a patient |
| US6773327B1 (en) * | 2002-02-12 | 2004-08-10 | Hasbro, Inc. | Apparatus for actuating a toy |
| US6669254B2 (en) * | 2002-04-12 | 2003-12-30 | Bel-Art Products, Inc. | Manual pick-up device |
| US6758809B2 (en) | 2002-06-06 | 2004-07-06 | Medtronic, Inc. | Surgical tool for engagement of body tissue |
| US20060058582A1 (en) | 2002-06-13 | 2006-03-16 | Usgi Medical Inc. | Disposable shapelocking system |
| US6783491B2 (en) | 2002-06-13 | 2004-08-31 | Vahid Saadat | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| US8298161B2 (en) | 2002-09-12 | 2012-10-30 | Intuitive Surgical Operations, Inc. | Shape-transferring cannula system and method of use |
| WO2004034767A2 (en) | 2002-09-20 | 2004-04-29 | Flowmedica, Inc. | Catheter system for renal therapy |
| US7649880B2 (en) * | 2002-11-12 | 2010-01-19 | Mark Adams | Systems and methods for deriving storage area commands |
| CN100389730C (zh) | 2002-12-06 | 2008-05-28 | 直观外科手术公司 | 用于手术工具的柔性肘节 |
| US6821284B2 (en) | 2003-01-22 | 2004-11-23 | Novare Surgical Systems, Inc. | Surgical clamp inserts with micro-tractive surfaces |
| US7235543B2 (en) * | 2003-03-07 | 2007-06-26 | Schering Corporation | Substituted azetidinone compounds, processes for preparing the same, formulations and uses thereof |
| US20060041188A1 (en) * | 2003-03-25 | 2006-02-23 | Dirusso Carlo A | Flexible endoscope |
| US6749550B1 (en) * | 2003-03-26 | 2004-06-15 | Sbl Machinery Co., Ltd. | Central drive linkage for cutting and creasing machine |
| US20040199052A1 (en) * | 2003-04-01 | 2004-10-07 | Scimed Life Systems, Inc. | Endoscopic imaging system |
| US8118732B2 (en) | 2003-04-01 | 2012-02-21 | Boston Scientific Scimed, Inc. | Force feedback control system for video endoscope |
| US8562640B2 (en) | 2007-04-16 | 2013-10-22 | Intuitive Surgical Operations, Inc. | Tool with multi-state ratcheted end effector |
| US8100824B2 (en) | 2003-05-23 | 2012-01-24 | Intuitive Surgical Operations, Inc. | Tool with articulation lock |
| US7410483B2 (en) | 2003-05-23 | 2008-08-12 | Novare Surgical Systems, Inc. | Hand-actuated device for remote manipulation of a grasping tool |
| US8182417B2 (en) | 2004-11-24 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Articulating mechanism components and system for easy assembly and disassembly |
| US7090637B2 (en) | 2003-05-23 | 2006-08-15 | Novare Surgical Systems, Inc. | Articulating mechanism for remote manipulation of a surgical or diagnostic tool |
| US7175904B2 (en) * | 2003-08-28 | 2007-02-13 | Congoleum Corporation | Non-vinyl flooring and method for making same |
| US7842028B2 (en) | 2005-04-14 | 2010-11-30 | Cambridge Endoscopic Devices, Inc. | Surgical instrument guide device |
| US7686826B2 (en) * | 2003-10-30 | 2010-03-30 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7147650B2 (en) | 2003-10-30 | 2006-12-12 | Woojin Lee | Surgical instrument |
| NL1025274C2 (nl) | 2004-01-16 | 2005-07-19 | Univ Delft Tech | Instrument voor fijn-mechanische of fijn-chirurgische toepassingen. |
| EP1750607A2 (en) * | 2004-06-02 | 2007-02-14 | Medtronic, Inc. | Loop ablation apparatus and method |
| US7678117B2 (en) | 2004-06-07 | 2010-03-16 | Novare Surgical Systems, Inc. | Articulating mechanism with flex-hinged links |
| US7828808B2 (en) | 2004-06-07 | 2010-11-09 | Novare Surgical Systems, Inc. | Link systems and articulation mechanisms for remote manipulation of surgical or diagnostic tools |
| US7465306B2 (en) * | 2004-08-13 | 2008-12-16 | Warsaw Orthopedic, Inc. | System and method for positioning a connecting member adjacent the spinal column in minimally invasive procedures |
| US7553275B2 (en) * | 2004-08-31 | 2009-06-30 | Surgical Solutions Llc | Medical device with articulating shaft |
| US9700334B2 (en) * | 2004-11-23 | 2017-07-11 | Intuitive Surgical Operations, Inc. | Articulating mechanisms and link systems with torque transmission in remote manipulation of instruments and tools |
| EP1838223A2 (en) | 2004-11-23 | 2007-10-03 | Novare Surgical Systems, Inc. | Articulating mechanisms and link systems with torque transmission in remote manipulation of instruments and tools |
| US7785252B2 (en) | 2004-11-23 | 2010-08-31 | Novare Surgical Systems, Inc. | Articulating sheath for flexible instruments |
| US20060201130A1 (en) * | 2005-01-31 | 2006-09-14 | Danitz David J | Articulating mechanisms with joint assembly and manual handle for remote manipulation of instruments and tools |
| US8105350B2 (en) | 2006-05-23 | 2012-01-31 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7862554B2 (en) | 2007-04-16 | 2011-01-04 | Intuitive Surgical Operations, Inc. | Articulating tool with improved tension member system |
| US9561045B2 (en) | 2006-06-13 | 2017-02-07 | Intuitive Surgical Operations, Inc. | Tool with rotation lock |
| US8409244B2 (en) | 2007-04-16 | 2013-04-02 | Intuitive Surgical Operations, Inc. | Tool with end effector force limiter |
| US7708758B2 (en) * | 2006-08-16 | 2010-05-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7648519B2 (en) * | 2006-09-13 | 2010-01-19 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| CA2823492C (en) | 2006-10-24 | 2016-03-29 | Carnegie Mellon University | Steerable multi-linked device having a modular link assembly |
| US8715270B2 (en) * | 2006-12-01 | 2014-05-06 | Boston Scientific Scimed, Inc. | Multi-part instrument systems and methods |
| US8465475B2 (en) * | 2008-08-18 | 2013-06-18 | Intuitive Surgical Operations, Inc. | Instrument with multiple articulation locks |
| US8574178B2 (en) * | 2009-05-26 | 2013-11-05 | The Hong Kong Polytechnic University | Wearable power assistive device for helping a user to move their hand |
| US20110022078A1 (en) * | 2009-07-23 | 2011-01-27 | Cameron Dale Hinman | Articulating mechanism |
-
2004
- 2004-11-24 US US10/997,249 patent/US7410483B2/en active Active
-
2005
- 2005-09-19 AU AU2005309974A patent/AU2005309974B2/en active Active
- 2005-09-19 EP EP05798376.9A patent/EP1833398B1/en active Active
- 2005-09-19 WO PCT/US2005/033377 patent/WO2006057702A2/en active Application Filing
- 2005-09-19 JP JP2007543032A patent/JP5188811B2/ja active Active
- 2005-09-19 EP EP18177374.8A patent/EP3391804A3/en active Pending
- 2005-09-19 CA CA2850651A patent/CA2850651C/en active Active
- 2005-09-19 CN CN200580047088A patent/CN100588375C/zh active Active
- 2005-09-19 EP EP14168730.1A patent/EP2823772B1/en active Active
- 2005-09-19 CA CA2588286A patent/CA2588286C/en active Active
-
2008
- 2008-04-24 US US12/109,333 patent/US9498888B2/en not_active Expired - Lifetime
-
2010
- 2010-04-23 US US12/766,820 patent/US8535347B2/en active Active
- 2010-04-23 US US12/766,818 patent/US9440364B2/en not_active Expired - Lifetime
- 2010-04-23 US US12/766,827 patent/US9550300B2/en not_active Expired - Lifetime
- 2010-04-23 US US12/766,825 patent/US9370868B2/en active Active
- 2010-04-23 US US12/766,822 patent/US9434077B2/en not_active Expired - Lifetime
-
2011
- 2011-09-08 JP JP2011195902A patent/JP5530991B2/ja active Active
- 2011-09-08 JP JP2011195903A patent/JP5409731B2/ja active Active
-
2013
- 2013-08-28 US US14/012,489 patent/US9085085B2/en not_active Expired - Lifetime
-
2016
- 2016-12-15 US US15/380,662 patent/US10722314B2/en not_active Expired - Lifetime
-
2020
- 2020-06-24 US US16/910,529 patent/US20200352666A1/en not_active Abandoned
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100588375C (zh) | 用于远程操纵抓持工具的手致动设备 | |
| CN100574709C (zh) | 用于远程操纵外科手术或诊断工具的活动连接装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |