EP0517874B1 - Dispositif comportant deux elements articules dans un plan, applique a un equipement de forage - Google Patents
Dispositif comportant deux elements articules dans un plan, applique a un equipement de forage Download PDFInfo
- Publication number
- EP0517874B1 EP0517874B1 EP92901738A EP92901738A EP0517874B1 EP 0517874 B1 EP0517874 B1 EP 0517874B1 EP 92901738 A EP92901738 A EP 92901738A EP 92901738 A EP92901738 A EP 92901738A EP 0517874 B1 EP0517874 B1 EP 0517874B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- elements
- lower element
- lever arm
- angle
- recess
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images






Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B17/00—Drilling rods or pipes; Flexible drill strings; Kellies; Drill collars; Sucker rods; Cables; Casings; Tubings
- E21B17/20—Flexible or articulated drilling pipes, e.g. flexible or articulated rods, pipes or cables
- E21B17/203—Flexible or articulated drilling pipes, e.g. flexible or articulated rods, pipes or cables with plural fluid passages
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/04—Directional drilling
- E21B7/06—Deflecting the direction of boreholes
- E21B7/067—Deflecting the direction of boreholes with means for locking sections of a pipe or of a guide for a shaft in angular relation, e.g. adjustable bent sub
Definitions
- the present invention relates to a device comprising two elements articulated in a single plane, having means for controlling the angle of misalignment of the two elements with respect to each other.
- One of the elements may have the freedom to rotate around its longitudinal axis whatever the angle of its misalignment with the other element.
- elbow fittings In the field of oil drilling, it is often necessary to use elbow fittings to divert the drilling of wells in a designated direction while following a predetermined path.
- elbow fittings with variable angle adjustable from the surface are used.
- patent FR-A-2432079 which relates to a device comprising two tubular elements assembled together, the first of the elements being able to pivot around an axis forming an angle with the ce of the other element .
- the rotation of the first element relative to the other causes a misalignment of the two elements.
- the misalignment is maximum for a rotation of 180 ° and is canceled for 360 °.
- the present invention by allowing control of the misalignment angle in a single plane for all positions, effectively solves this problem.
- US Pat. No. 3,627,356 discloses an elbow connector articulated in a plane, the angle of which is varied in particular by sending a rigid rod through the drill string.
- This device cannot be used when gravity is no longer active, as is the case in highly inclined drilling.
- the diameter of the internal passage for the circulation of fluids is significantly reduced.
- the device, object of the invention can be interposed between drilling tool and downhole motor since the lower element can be driven in rotation by the motor rotor. It will not go beyond the scope of this invention if a downhole motor is placed between the drilling tool and said device
- the present invention makes it possible to solve these problems by using the rotation of an eccentric as means for controlling the angle of misalignment of one element with respect to the other.
- the present invention uses the principle of a ball joint which gives it great mechanical resistance to axial or bending forces, in fact the distribution of forces is much better compared with a flat joint, in particular an axis.
- the present invention relates to a device allowing two elements connected by a joint to take angles of misalignment with respect to each other, in the same plane designated by displacement plane, one of the elements designated as lower extending beyond the joint in the form of a lever arm located in a second hollow element designated as upper.
- This device is characterized in that the articulation is of the ball joint type, in that said device comprises guide means maintaining the movement of the two elements in said displacement plane, said means are incorporated in the upper element, in that said device also includes in the upper element means for controlling said misalignment angle, and in that said control means comprises an eccentric, the position of which determines said angle.
- the control means may comprise a part substantially in the form of a ring, the internal recess in which said lever arm is positioned, has a cross section of circular shape whose center is eccentric relative to the axis of the upper element, and at the level of said ring, said lever arm may have two faces symmetrical with respect to its longitudinal axis and perpendicular to the plane of movement of the two elements, said recess may comprise a member guided in rotation by said recess and itself comprising an optionally oblong opening cooperating with said faces of the lever arm.
- the lower element may be hollow and comprise at the upper end of said lever arm a flexible and sealed connection cooperating with the end of a pipe allowing the circulation of a fluid through the lower element.
- the lower element can rotate around its axis, and said lever arm can cooperate with a coaxial fur whose angular position is fixed relative to said displacement plane.
- the pipe cooperating with the upper end of the lower element may be a hollow shaft for transmitting torque on the lower element.
- the guidance and control means can include light and face systems and some, at least, of said faces can be carried by said fur.
- the member guided in rotation by said recess may comprise two identical sectors filling the two spaces delimited by each face and the interior recess of the ring, and this recess may have the form of a symmetrical truncation of a sphere, and said sectors may be truncation sectors of said sphere.
- the upper element may include a control shaft which is concentric with it, and said control shaft may be rotationally integral with the ring.
- the device can include remote control means for controlling the angle of misalignment of the two elements.
- the present invention also relates to the application of the device to an integrated assembly in particular in a drill string.
- the application of the device can be characterized in that the device cooperates with a drilling tool screwed onto the lower element, with a bottom motor, a set of articulated elements, drill collars, drill rods.
- the device can also be applied to a drill string which may include from the bottom up: a drilling tool, said device, a downhole motor, articulated elements, drill rods, drill rods. Bottom motor and articulated elements can be reversed.
- the device can also be applied to a drill string which is characterized in that the drill string can comprise a bottom motor screwed onto the lower element of said device and in that a drilling tool is then screwed to the rotor of said motor.
- FIG. 1 represents a block diagram of the device which will allow a better understanding of the operation of the means for controlling the angle of misalignment of the two elements with respect to each other.
- the lower element 1 is assembled with the upper element 2 by an articulated means of the ball-joint type 3.
- the lower element 1 is extended beyond the articulation 3 by a lever arm 7.
- the latter is present on the Figure 1, a portion of length in the form of a regular prism whose cross section has four parallel sides two by two and whose pairs of faces are perpendicular to each other.
- the guidance and control means are located at this portion of the lever arm.
- the guide means 4 comprise a slot 11 of elongated shape dimensioned to guide the lever arm 7 in the plane of movement.
- the guide means 4 are integral with the upper element 2.
- the means for controlling the angle of misalignment of the two elements 1 and 2 comprise a part substantially in the form of a ring 5.
- the external surface of this ring 5 is concentric in the body of the upper element 2 and free to rotate around of axis 12.
- the ring 5 has an interior recess of circular shape, the center of which is off-center with respect to the axis 12 which represents the axis of rotation of the ring 5.
- This eccentric recess will give the ring the name of eccentric 5. This term will be used in the following description.
- a control shaft 9 is integral in rotation with the eccentric ring 5.
- the part 6 comprises an opening 10 of elongated shape dimensioned to cooperate with the faces 14 and 15 of the lever arm. This light is preferably centered on the axis of the part 6.
- the guide means are placed elsewhere than at the level of the lever arm 7. They may in particular be substantially at the level of the ball joint 3 or even opposite the lever arm 7 with respect to the joint.
- the guide means maintain the angular displacement of the lower element in a single plane containing the axis 12 of the upper element.
- a guide means which further excludes the rotation of the lower element around its longitudinal axis 13. This is not limiting of the principle which is based in particular on the fact that the light guide faces of the part 6 must remain perpendicular to the plane of movement and parallel to the axis 13. This is particularly the case where it is desired to reduce the mechanical play.
- the faces 14 and 15 are fixed in rotation by the guide means and the cooperation of the faces 14 and 15 with the light 10 indexes the position of the part 6 in the desired direction.
- the faces 14 and 15 which are subject to remain in the plane perpendicular to the plane of movement of the lever arm are driven, by cooperation with the light 10 of the part 6, substantially in a translational movement on either side of the axis 12.
- the lower element, linked to said faces by the lever arm, is thereby displaced in an angular manner around the joint and in the plane of movement.
- the value of the misalignment angle (i) is the angle between axis 12 and axis 13.
- control shaft 24 is connected by coupling means, with remote actuation equipment such as that taught by patent FR-2641320.
- bottom motor In both cases where the bottom motor is either screwed onto the upper element of the device, or screwed onto the lower element, it is preferable to use a type of bottom motor whose length is comparable with the length of the elements articulated 37.
- the articulated elements do not need to include a flexible torque transmission shaft, but simply allow the circulation of a pressurized fluid to the drilling tool.
Abstract
Description
- La présente invention concerne un dispositif comportant deux éléments articulés dans un seul plan, ayant des moyens de contrôle de l'angle de désalignement des deux éléments l'un par rapport à l'autre. L'un des éléments pouvant avoir la liberté de tourner autour de son axe longitudinal quel que soit l'angle de son désalignement avec l'autre élément.
- Dans le domaine du forage pétrolier, il est souvent nécessaire d'utiliser des raccords coudés pour dévier le forage des puits dans une direction désignée tout en suivant une trajectoire prédéterminée.
- Pour avoir des moyens de conduite précis, et qui dans le même temps limitent les pertes de temps en manoeuvre de garniture de forage, on utilise des raccords coudés à angle variable réglables depuis la surface.
- L'art antérieur peut être illustré par le brevet FR-A-2432079 qui concerne un dispositif comportant deux éléments tubulaires assemblés entre eux, le premier des éléments pouvant pivoter autour d'un axe formant un angle avec l'ce de l'autre élément. La rotation du premier élément par rapport à l'autre provoque un désalignement des deux éléments. Le désalignement est maximum pour une rotation de 180° et s'annule pour 360°.
- Mais le principe de ce dispositif fait décrire au premier élément les génératrices d'un cône. Cela procure de grands inconvénients, en temps de réglage et en précision lorsque l'on veut ou doit maintenir la trajectoire du puits suivant un plan. En effet si l'on se réfère au plan définit par l'axe du filetage supérieur du raccord et l'axe de l'élément inférieur, ce plan change d'orientation pour chaque valeur d'angle de désalignement. Donc, à chaque réglage du coude, il faut rétablir l'orientation correcte de ce plan pour suivre la trajectoire projetée.
- De plus, ce principe de déplacement provoque des couples de torsion sur la garniture de forage.
- La présente invention, en permettant le contrôle de l'angle de désalignement dans un plan unique pour toutes les positions, résout efficacement ce problème.
- On connaît par le brevet US-A-3627356, un raccord coudé articulé dans un plan dont la variation d'angle se fait notamment par l'envoi de tige rigide à travers la garniture de forage.
- Ce dispositif ne peut pas être utilisé lorsque la gravité n'est plus active comme c'est le cas dans les forages fortement inclinés. De plus, le diamètre du passage intérieur de circulation des fluides est notablement diminué.
- L'art antérieur illustré par ces deux brevets ne décrit pas de dispositif articulé permettant de faire tourner sur son axe un des éléments du dispositif, en effet lorsque l'on utilise un raccord coudé dans une garniture de forage, on intercale obligatoirement, un moteur de fond entre l'outil de forage et la connexion inférieure du raccord coudé. Cela éloigne d'autant le coude de l'outil de forage et réduit considérablement l'effet déviateur d'une telle garniture.
- Le dispositif, objet de l'invention, peut être intercalé entre outil de forage et moteur de fond puisque l'élément inférieur peut être entraîné en rotation par le rotor du moteur. On ne sortira pas du cadre de cette invention si un moteur de fond est placé entre l'outil de forage et ledit dispositif
- La présente invention permet de résoudre ces problèmes par l'utilisation de la rotation d'un excentrique comme moyens de contrôle de l'angle de désalignement d'un élément par rapport à l'autre.
- La présente invention utilise le principe d'une articulation en rotule ce qui lui confère une grande résistance mécanique aux efforts axiaux ou de flexion, en effet la répartition des efforts y est bien meilleure comparativement avec une articulation plane, notamment un axe.
- Ainsi, la présente invention concerne un dispositif permettant à deux éléments reliés par une articulation de prendre des angles de désalignement l'un par rapport à l'autre, dans un même plan désigné par plan de déplacement, l'un des éléments désigné comme inférieur se prolongeant au-delà de l'articulation sous forme d'un bras de levier situé dans un deuxième élément creux désigné comme supérieur.
- Ce dispositif se caractérise en ce que l'articulation est de type rotule, en ce que ledit dispositif comporte des moyens de guidage maintenant le déplacement des deux éléments dans ledit plan de déplacement, lesdits moyens sont incorporés dans l'élément supérieur, en ce que ledit dispositif comporte également dans l'élément supérieur des moyens de contrôle dudit angle de désalignement, et en ce que lesdits moyens de contrôle comporte un excentrique dont la position détermine ledit angle.
- Les moyens de contrôle peuvent comporter une pièce sensiblement en forme d'anneau dont l'évidement intérieur, dans lequel est positionné ledit bras de levier, présente une section droite de forme circulaire dont le centre est excentré par rapport à l'axe de l'élément supérieur, et au niveau dudit anneau, ledit bras de levier peut comporter deux faces symétriques par rapport à son axe longitudinal et perpendiculaires au plan de déplacement des deux éléments, ledit évidement peut comporter un organe guidé en rotation par ledit évidement et comportant lui-même une lumière éventuellement oblongue coopérant avec lesdites faces du bras de levier.
- L'élément inférieur peut être creux et comporter à l'extrémité supérieure dudit bras de levier une liaison souple et étanche coopérant avec l'extrémité d'une canalisation permettant la circulation d'un fluide à travers l'élément inférieur.
- L'élément inférieur peut tourner autour de son axe, et ledit bras de levier peut coopérer avec une fourrure coaxiale dont la position angulaire est fixe par rapport audit plan de déplacement.
- La canalisation coopérant avec l'extrémité supérieure de l'élément inférieur peut être un arbre creux de transmission de couple de rotation sur l'élément inférieur.
- Les moyens de guidage et de contrôle peuvent comporter des systèmes de lumières et de faces et certaines, au moins, desdites faces peuvent être portées par ladite fourrure.
- L'organe guidé en rotation par ledit évidement peut comporter deux secteurs identiques comblant les deux espaces délimités par chaque face et l'évidement intérieur de l'anneau, et cet évidement peut avoir une forme de troncature symétrique de sphère, et lesdits secteurs peuvent être des secteurs de troncature de ladite sphère.
- L'élément supérieur peut comporter un arbre de commande qui lui est concentrique, et ledit arbre de commande peut être solidaire en rotation à l'anneau.
- Le dispositif peut comporter des moyens de télécommande des moyens de contrôle de l'angle de désalignement des deux éléments.
- La présente invention concerne également l'application du dispositif à un ensemble intégré notamment dans une garniture de forage.
- L'application du dispositif peut être caractérisée en ce que le dispositif coopère avec un outil de forage vissé sur l'élément inférieur, avec un moteur de fond, un ensemble d'éléments articulés, des masses-tiges, des tiges de forage.
- Le dispositif peut être également appliqué à une garniture de forage qui peut comporter de bas en haut : un outil de forage, ledit dispositif, un moteur de fond, des éléments articulés, des masses-tiges, des tiges de forage. Moteur de fond et éléments articulés peuvent être intervertis.
- Le dispositif peut être également appliqué à une garniture de forage qui se caractérise en ce que la garniture de forage peut comporter un moteur de fond vissé sur l'élément inférieur dudit dispositif et en ce qu'un outil de forage est alors vissé sur le rotor dudit moteur.
- La présente invention sera mieux comprise et ses avantages apparaîtront plus nettement à la description qui suit d'exemples particuliers, nullement limitatifs, illustrés par les figures ci-annexées, parmi lesquelles:
- la figure 1 représente un schéma de principe concernant les moyens de guidage et de contrôle de l'angle de désalignement des deux éléments,
- la figure 2 représente un mode de réalisation du dispositif appliqué à un raccord coudé pour forage,
- les figures 3a et 3b montrent les coupes droites respectivement suivant les plans A et B du dispositif représenté en figure 2,
- la figure 4 représente le détail de la fourrure et des faces coopérants avec les moyens de guidage et de contrôle, suivant un mode de réalisation préférentiel,
- les figures 5a, 5b, 5c, 5d, 5e représentent les coupes droites par les plans A et B en fonction de cinq positions en rotation de l'anneau,
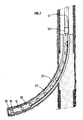
- la figure 6 représente un mode d'application du dispositif au forage incliné,
- la figure 7 représente un autre agencement des équipements dans un mode d'application du dispositif au forage incliné,
- la figure 8 représente un mode de réalisation préférentiel d'éléments articulés,
- la figure 8a représente la vue de face de l'articulation d'un élément articulé,
- la figure 9 représente un autre mode de réalisation d'éléments articulés comportant un arbre de transmission en matériau composite,
- la figure 9a représente un guidage de l'arbre de transmission en composite.
- La figure 1 représente un schéma de principe du dispositif qui permettra de mieux comprendre le fonctionnement des moyens de contrôle de l'angle de désalignement des deux éléments l'un par rapport à l'autre.
- L'élément inférieur 1 est assemblé avec l'élément supérieur 2 par un moyen articulé de type rotule 3. L'élément inférieur 1 est prolongé au-delà de l'articulation 3 par un bras de levier 7. Celui-ci présente sur la figure 1, une portion de longueur en forme de prisme régulier dont la section droite comporte quatre cotés parallèles deux à deux et dont les couples de faces sont perpendiculaires entre eux. Les moyens de guidage et de contrôle sont situés au niveau de cette portion du bras de levier.
- Les moyens de guidage 4 comportent une lumière 11 de forme allongée dimensionnée pour guider le bras de levier 7 dans le plan de déplacement. Les moyens de guidage 4 sont solidaires de l'élément supérieur 2.
- Les moyens de contrôle de l'angle de désalignement des deux éléments 1 et 2 comportent une pièce sensiblement en forme d'anneau 5. La surface extérieure de cet anneau 5 est concentrique dans le corps de l'élément supérieur 2 et libre en rotation autour de l'axe 12.
- L'anneau 5 comporte un évidement intérieur de forme circulaire dont le centre est décentré par rapport à l'axe 12 qui représente l'axe de rotation de l'anneau 5. Cet évidement excentrique donnera l'appellation d'excentrique à l'anneau 5. Ce terme sera employé dans la suite de la description.
- Un arbre de commande 9 est solidaire en rotation avec l'anneau excentrique 5.
- Une pièce 6, notamment en forme de disque est inscrite audit évidemment. La pièce 6 comporte une lumière 10 de forme allongée dimensionnée pour coopérer avec les faces 14 et 15 du bras de levier. Cette lumière est de préférence centrée sur l'axe de la pièce 6.
- On ne sortira pas du cadre de cette invention si les moyens de guidage sont placés ailleurs qu'au niveau du bras de levier 7. Ils peuvent être notamment sensiblement au niveau de l'articulation rotule 3 ou même à l'opposé du bras de levier 7 par rapport à l'articulation.
- On ne sortira pas du cadre de cette invention par l'utilisation d'autres procédés de guidage latéral que celui comportant une lumière 11.
- Le principe du dispositif représenté en figure 1 est le suivant:
- Les moyens de guidage maintiennent le déplacement angulaire de l'élément inférieur dans un plan unique contenant l'axe 12 de l'élément supérieur. Pour la simplicité de la figure 1 et de l'exposé du principe, on a représenté en exemple un moyen de guidage qui de plus exclut la rotation de l'élément inférieur autour de son axe longitudinal 13. Cela n'est pas limitatif du principe qui est basé notamment sur le fait que les faces de guidages de la lumière de la pièce 6 doivent rester perpendiculaires au plan de déplacement et parallèles à l'axe 13. Cela est particulièrement le cas où l'on souhaite réduire les jeux mécaniques. Dans l'exemple décrit figure 1, les faces 14 et 15 sont fixées en rotation par les moyens de guidage et la coopération des faces 14 et 15 avec la lumière 10 indexe la position de la pièce 6 suivant la direction désirée.
- On ne sortira pas du cadre de cette invention par l'utilisation d'autres moyens d'indexation de la position angulaire de la pièce 6.
- Lorsque l'on fait tourner l'arbre de commande 9 d'un tour, la rotation sur 360° de l'excentrique 5 autour de l'axe 12 fait décrire au centre de la pièce 6 un cercle dont le rayon a pour valeur l'excentration de l'évidement de l'anneau 5.
- Les faces 14 et 15 qui sont assujetties à rester dans le plan perpendiculaire au plan de déplacement du bras de levier sont entraînées, par la coopération avec la lumière 10 de la pièce 6, sensiblement dans un mouvement de translation de part et d'autre de l'axe 12. L'élément inférieur, lié audites faces par le bras de levier, est déplacé par ce fait d'une façon angulaire autour de l'articulation et dans le plan de déplacement. L'angle de désalignement a pour valeur (i), angle entre l'axe 12 et l'axe 13.
- La figure 2 représente une réalisation préférentielle du dispositif comportant:
- un élément inférieur 16 assemblé sur l'élément supérieur 18 par le moyen d'une rotule sphérique 17. Ce type d'assemblage présente de grands avantages pour obtenir une grande résistance mécanique indispensable à ce dispositif. En effet que ce soit en traction ou compression, les efforts peuvent être répartis sur une grande surface grâce à la forme sphérique de l'articulation. D'autre part, l'élément inférieur pouvant tourner sur son axe 13, la constitution de l'articulation comporte deux hémisphères emprisonnant une butée bidirectionnelle à galets liée à l'élément inférieur 16.
- L'élément inférieur 16 est traversé entièrement par un canal 42,
- un bras de levier 19 comportant à son extrémité une fourrure 20 concentrique à l'axe 13 et montée sur roulement,
- un joint souple et étanche 21 coopère avec une canalisation 22,
- un système de liaison en rotation 23 solidarise en rotation la canalisation 22 avec l'élément inférieur 16 par l'intermédiaire de la partie supérieure du bras de levier 19, la canalisation 22 sera alors également un arbre de transmission de couple de rotation à l'élément inférieur,
- un moyen de guidage latéral sensiblement au niveau de la coupe B est solidaire de l'élément supérieur 18. Il comporte deux secteurs 28 et 29 solidaires du corps de l'élément supérieur. Ces deux secteurs coopèrent avec les deux plats 31 et 32 de la fourrure 20. Le système de guidage est ainsi suffisamment éloigné de l'articulation afin de mieux résister aux efforts mécaniques notamment de flexion,
- un moyen de contrôle de l'angle de désalignement au niveau de la coupe A. Il comporte un anneau 25 dont la surface extérieure est concentrique au corps de l'élément supérieur 18. Cet anneau comporte un évidement 30 en forme de troncature de sphère. Le centre de cet évidement est excentré par rapport à l'axe 12. Un arbre 24 de commande en rotation est solidaire de l'anneau excentrique 25. L'ensemble arbre et anneau est monté sur des roulements coaxiaux avec le corps de l'élément supérieur. Des secteurs 26 et 27, complémentaires à la forme de l'évidement fixent latéralement la fourrure 20 par le moyen des plats 33 et 34. Les plats 33 et 34 sont perpendiculaires à l'autre couple de plats 31 et 32 de la même fourrure. Les secteurs 26 et 27 sont libres de glisser dans l'évidement 30, notamment dans le plan perpendiculaire à l'axe 13 et passant par le centre de la troncature de sphère de l'évidement 30.
- un tube souple 43 est fixé, d'un coté à l'extrémité inférieure de l'élément supérieur et de l'autre à l'élément inférieur 16 afin d'isoler l'alésage de l'élément supérieur 18 de l'ambiance extérieure dans laquelle baigne le dispositif de notre invention.
- L'arbre de commande 24 est connecté par des moyens de couplage, avec un équipement d'actionnement à distance tel celui enseigné par le brevet FR-2641320.
- La figure 3a représente la coupe du dispositif au niveau A de la figure 2:
- l'excentrique 25 comporte notamment un évidement 30 décentré par rapport à l'axe 12 de l'élément supérieur,
- des pièces 26 et 27 de section en demi-lunes maintiennent la position de la fourrure 20 dans l'évidement excentré 30.
- La figure 3b représente la coupe du dispositif au niveau B de la figure 2 :
- les pièces 28 et 29 guident, par l'intermédiaire de la fourrure 20, l'élément inférieur 16 dans le plan représenté par la ligne xy. Les pièces 28 et 29 sont solidaires de l'élément supérieur 18.
- La figure 4 représente en perspective la fourrure 20. Cette fourrure montée sur roulement sur le bras de levier laisse la liberté à l'élément inférieur 16 de tourner autour de son axe tout en étant déplacé angulairement par l'excentrique :
- les faces 31 et 32 coopèrent avec les pièces 28 et 29,
- les faces 33 et 34 coopèrent avec les pièces 26 et 27.
- Les figures 5a, 5b, 5c, 5d et 5e représentent les positions relatives de l'axe 13 de l'élément inférieur par rapport à l'axe 12 de l'élément supérieur en figurant les deux coupes B et A respectivement au niveau du guidage latéral et au niveau du dispositif de déplacement. La fourrure n'est pas représentée ici afin de simplifier les figures. Le repère 35 permet de visualiser la rotation de l'excentrique :
- en figure 5a, le repère 35 est dans le plan perpendiculaire au plan de déplacement de l'élément inférieur, les axes 12 et 13 sont confondus,
- en figure 5b, l'excentrique a subi une rotation de 45° et l'axe 13 est décalé de l'axe 12 d'un angle intermédiaire, dans le même mouvement les secteurs 26 et 27 ont glissé relativement aux faces de la fourrure,
- en figure 5c, l'excentrique a tourné de 90° et l'axe 13 a atteint le décalage angulalre maximal du coté du repère 35,
- en figure 5d, l'excentrique a tourné de 180° au total, les axes 12 et 13 sont confondus comme en figure 5a,
- en figure 5e, l'excentrique a tourné de 270° au total, le décalage angulaire de 13 par rapport à 12 est à son maximum, mais du coté opposé à celui de la figure 5c.
- On ne sortira pas du cadre de cette invention si les composants dudit dispositif sont agencés et construits de manière à ce que la variation angulaire entre les axes 12 et 13 se fait uniquement entre une valeur nulle et une valeur maximale d'angle, et cela dans un seul sens. En effet, il est souvent inutile d'avoir, comme sur les figures 5C et 5E, un désaxage angulaire de part et d'autre de la position coaxiale représentée su les figures 5A et 5D. Cela est aisément réalisable notamment par un dessin adapté de l'élément inférieur (1, 16) par rapport au bras de levier (7, 19).
- La figure 6 représente l'application dudit dispositif au forage incliné:
- un outil de forage 36 vissé sur l'élément inférieur 16 permet le forage d'un puits 40 de trajectoire courbe,
- l'élément supérieur 18 est connecté à des éléments articulés 37. Un mode de réalisation de ces éléments articulés 37 est représenté figure 8. Les extrémités des tubes 45 sont vissées sur des raccords 46 comportant dans leur partie centrale une articulation plane 44. Les éléments articulés 37 ont leurs articulations 44 toutes dans le même plan afin que la déformation de l'ensemble souple ainsi constitué soit sensiblement un arc de cercle. La courbure atteinte est fixée par le déplacement angulaire de chaque rotule et la longueur de tubes de chaque élément entre deux raccords 46. Les éléments 37 sont creux afin de contenir un arbre souple de transmission du couple à l'élément inférieur dudit dispositif. En figure 8, on a représenté un arbre de transmission comportant des tubes 47 en acier, assemblés au niveau des raccords 46 par des joints type cardan 48. Cet arbre de transmission transmet le couple de rotation du rotor du moteur de fond 38 à la canalisation 22 dudit dispositif. Les figures 9 et 9a représentent un autre mode de réalisation des éléments articulés comportant un arbre de transmission en matériau composite suffisamment souple pour ne pas nécessiter de joint articulé type cardan. La figure 9 donne un exemple de jonction 50 des tubes en matériau composite 49. La figure 9a montre un guidage 51 du tube en matériau composite, au niveau d'un raccord d'éléments articulés 37.
- La figure 7 représente l'application du dispositif, objet de notre invention, pour le forage incliné, mais suivant la disposition suivante des équipements avec, de bas en haut:
- outil de forage 36 vissé sur l'élément inférieur,
- moteur de fond 38 vissé sur l'élément supérieur,
- éléments articulés 37,
- masses-tiges 39, puis tiges de forage 41 jusqu'en surface.
- Dans les deux cas où le moteur de fond est soit vissé sur l'élément supérieur du dispositif, soit vissé sur l'élément inférieur, il est préférable d'utiliser un type de moteur de fond dont la longueur est comparable avec la longueur des éléments articulés 37.
- Dans les deux cas précédents, les éléments articulés n'ont pas besoin de comporter un arbre souple de transmission de couple, mais simplement permettre la circulation d'un fluide sous pression jusqu'à l'outil de forage.
Claims (13)
- Dispositif permettant, à deux éléments (1, 2; 16, 18) reliés par une articulation (3, 17), de prendre un angle de désalignement l'un par rapport à l'autre, dans un même plan désigné par plan de déplacement, l'un des éléments (1, 16) désigné comme inférieur se prolongeant au-delà de l'articulation (3, 17) sous forme d'un bras de levier (7, 19) situé dans le deuxième élément (2, 18) creux désigné comme supérieur, caractérisé en ce que l'articulation (3, 17) est de type rotule, en ce que ledit dispositif comporte des moyens de guidage (4, 28 et 29) maintenant le déplacement des deux éléments dans ledit plan de déplacement, lesdits moyens étant incorporés dans l'élément supérieur (2, 18), en ce que ledit dispositif comporte également dans l'élément supérieur des moyens de contrôle dudit angle de désalignement, et en ce que lesdits moyens de contrôle comportent une pièce sensiblement en forme d'anneau comportant un trou (30) excentré dont la position angulaire par rapport à l'axe (12) dudit deuxième élément (2, 18) détermine ledit angle.
- Dispositif selon la revendication 1, caractérisé en ce que ledit bras de levier (7, 19) est positionné dans ledit trou (30), ledit trou présente une section droite de forme circulaire dont le centre est excentré par rapport à l'axe (12) de l'élément supérieur (2, 18), en ce qu'au niveau dudit anneau (5, 25), ledit bras de levier comporte deux faces (14, 15; 33 et 34) symétriques par rapport à son axe (13) longitudinal et perpendiculaires au plan de déplacement des deux éléments, et en ce que ledit évidement (30) comporte un organe (6, 26 et 27) guidé en rotation par ledit évidement et comportant lui-même une lumière (10) éventuellement oblongue coopérant avec lesdites faces (14, 15) du bras de levier (7, 19).
- Dispositif selon l'une des revendications 1 ou 2, caractérisé en ce que l'élément inférieur (1, 16) est creux et comporte à l'extrémité supérieure dudit bras de levier (7, 19) une liaison (21) souple et étanche coopérant avec l'extrémité d'une canalisation (22) permettant la circulation d'un fluide à travers l'élément inférieur.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que l'élément inférieur peut tourner autour de son axe, en ce que ledit bras de levier coopère avec au moins une fourrure (20) coaxiale, et en ce que ladite fourrure (22) a une position angulaire fixe par rapport audit plan de déplacement.
- Dispositif selon la revendication 4, caractérisé en ce que la canalisation (22) coopérant avec l'extrémité supérieure de l'élément inférieur est un arbre creux de transmission de couple de rotation sur l'élément inférieur.
- Dispositif selon l'une des revendications 4 ou 5, caractérisé en ce que lesdits moyens de guidage et de contrôle comportent des systèmes de lumières et de faces (31, 32 ; 33, 34) et en ce que certaines, au moins, desdites faces sont portées par ladite fourrure (20).
- Dispositif selon l'une des revendications 2 à 6, caractérisé en ce que l'organe guidé en rotation par ledit évidement (30) comporte deux secteurs (26, 27) identiques comblant les deux espaces délimités par chaque face (33, 34) et l'évidement (30) intérieur de l'anneau (25), en ce que cet évidement (30) a une forme de troncature symétrique de sphère, et en ce que lesdits secteurs (26, 27) sont des secteurs de troncature de ladite sphère.
- Dispositif selon l'une des revendications précédentes, caractérisé en ce que l'élément supérieur comporte un arbre de commande (24) qui lui est concentrique, et en ce que ledit arbre est solidaire en rotation de l'anneau (25).
- Dispositif selon l'une des revendications précédentes, caractérisé en ce qu'il comporte des moyens de télécommande des moyens de contrôle de l'angle de désalignement des deux éléments.
- Application du dispositif selon l'une des revendications précédentes à un équipement intégré dans une garniture de forage.
- Application du dispositif selon la revendication 10, caractérisée en ce que le dispositif coopère avec un outil de forage (36) vissé sur l'élément inférieur (16), avec un moteur de fond (38), un ensemble d'éléments articulés (37), des masses-tiges (39), des tiges de forage (41).
- Application du dispositif selon l'une des revendications 10 ou 11, caractérisée en ce que la garniture de forage comporte de bas en haut : un outil de forage (36), ledit dispositif, un moteur de fond (38), des éléments articulés (37), des masses-tiges (39), de tiges de forage (41), et en ce que moteur de fond et éléments articulés peuvent être intervertis.
- Application du dispositif selon la revendication 10, caractérisée en ce que la garniture de forage comporte un moteur de fond (38) vissé sur l'élément inférieur (16) dudit dispositif et en ce qu'un outil de forage (36) est vissé sur le rotor dudit moteur (38).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR9016442A FR2671130B1 (fr) | 1990-12-28 | 1990-12-28 | Dispositif comportant deux elements articules dans un plan, applique a un equipement de forage. |
| FR9016442 | 1990-12-28 | ||
| PCT/FR1991/000977 WO1992012324A1 (fr) | 1990-12-28 | 1991-12-06 | Dispositif comportant deux elements articules dans un plan, applique a un equipement de forage |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0517874A1 EP0517874A1 (fr) | 1992-12-16 |
| EP0517874B1 true EP0517874B1 (fr) | 1995-03-22 |
Family
ID=9403808
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP92901738A Expired - Lifetime EP0517874B1 (fr) | 1990-12-28 | 1991-12-06 | Dispositif comportant deux elements articules dans un plan, applique a un equipement de forage |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US5305838A (fr) |
| EP (1) | EP0517874B1 (fr) |
| CA (1) | CA2076627A1 (fr) |
| FR (1) | FR2671130B1 (fr) |
| WO (1) | WO1992012324A1 (fr) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5411082A (en) * | 1994-01-26 | 1995-05-02 | Baker Hughes Incorporated | Scoophead running tool |
| US5484029A (en) * | 1994-08-05 | 1996-01-16 | Schlumberger Technology Corporation | Steerable drilling tool and system |
| US5617926A (en) * | 1994-08-05 | 1997-04-08 | Schlumberger Technology Corporation | Steerable drilling tool and system |
| US5727641A (en) * | 1994-11-01 | 1998-03-17 | Schlumberger Technology Corporation | Articulated directional drilling motor assembly |
| US5542482A (en) * | 1994-11-01 | 1996-08-06 | Schlumberger Technology Corporation | Articulated directional drilling motor assembly |
| DE19612902C2 (de) * | 1996-03-30 | 2000-05-11 | Tracto Technik | Verfahren zum Richtungsbohren und eine Vorrichtung zur Durchführung des Verfahrens |
| US5803187A (en) * | 1996-08-23 | 1998-09-08 | Javins; Brooks H. | Rotary-percussion drill apparatus and method |
| US6092610A (en) * | 1998-02-05 | 2000-07-25 | Schlumberger Technology Corporation | Actively controlled rotary steerable system and method for drilling wells |
| US6158529A (en) * | 1998-12-11 | 2000-12-12 | Schlumberger Technology Corporation | Rotary steerable well drilling system utilizing sliding sleeve |
| US6109372A (en) * | 1999-03-15 | 2000-08-29 | Schlumberger Technology Corporation | Rotary steerable well drilling system utilizing hydraulic servo-loop |
| US6216802B1 (en) | 1999-10-18 | 2001-04-17 | Donald M. Sawyer | Gravity oriented directional drilling apparatus and method |
| DE60011587T2 (de) | 1999-11-10 | 2005-06-30 | Schlumberger Holdings Ltd., Road Town | Steuerungsverfahren für steuerbares bohrsystem |
| US6364034B1 (en) * | 2000-02-08 | 2002-04-02 | William N Schoeffler | Directional drilling apparatus |
| US7188685B2 (en) * | 2001-12-19 | 2007-03-13 | Schlumberge Technology Corporation | Hybrid rotary steerable system |
| US7513318B2 (en) * | 2002-02-19 | 2009-04-07 | Smith International, Inc. | Steerable underreamer/stabilizer assembly and method |
| US7506703B2 (en) * | 2006-01-18 | 2009-03-24 | Smith International, Inc. | Drilling and hole enlargement device |
| US7861802B2 (en) * | 2006-01-18 | 2011-01-04 | Smith International, Inc. | Flexible directional drilling apparatus and method |
| FR2898935B1 (fr) * | 2006-03-27 | 2008-07-04 | Francois Guy Jacques Re Millet | Dispositif d'orientation d'outils de forage |
| US7810582B2 (en) * | 2007-11-19 | 2010-10-12 | Webb Charles T | Counterbalance enabled power generator for horizontal directional drilling systems |
| US9410390B2 (en) * | 2010-08-24 | 2016-08-09 | Stanislav Tolstihin | Device for drilling through a formation |
| US9068423B2 (en) | 2012-02-03 | 2015-06-30 | National Oilwell Varco, L.P. | Wellhead connector and method of using same |
| US9074450B2 (en) | 2012-02-03 | 2015-07-07 | National Oilwell Varco, L.P. | Blowout preventer and method of using same |
| US9816326B2 (en) | 2012-04-04 | 2017-11-14 | National Oilwell Varco, L.P. | Misalignment-tolerant wellsite connection assembly, system, and method |
| CN104334823B (zh) | 2012-04-05 | 2017-03-01 | 国民油井华高公司 | 具有活塞驱动套筒的井场连接器及其使用方法 |
| CN103061674A (zh) * | 2012-11-29 | 2013-04-24 | 中国石油集团长城钻探工程有限公司 | 井下油层钻孔器 |
| US9366087B2 (en) * | 2013-01-29 | 2016-06-14 | Schlumberger Technology Corporation | High dogleg steerable tool |
| WO2015200390A1 (fr) * | 2014-06-24 | 2015-12-30 | Pine Tree Gas, Llc | Systèmes et procédés de forage de trou de forage présentant un petit rayon de courbure |
| CA2984457C (fr) | 2015-07-02 | 2019-01-15 | Halliburton Energy Services, Inc. | Appareil de forage dote d'un arbre d'entrainement incline fixe interieurement |
| CN111287659B (zh) * | 2020-03-30 | 2021-09-07 | 西安石油大学 | 一种基于全旋转指向式导向钻井工具的造斜率调节方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3190374A (en) * | 1960-12-22 | 1965-06-22 | Neyrpic Ets | Soil drilling apparatus having means to change the direction of the drill |
| US3586116A (en) * | 1969-04-01 | 1971-06-22 | Turboservice Sa | Directional drilling equipment |
| US3627356A (en) * | 1969-11-19 | 1971-12-14 | Edwin A Anderson | Directional drilling apparatus with retrievable limiting device |
| US3667556A (en) * | 1970-01-05 | 1972-06-06 | John Keller Henderson | Directional drilling apparatus |
| US3853186A (en) * | 1973-03-12 | 1974-12-10 | Continental Oil Co | Drilling assembly deflection apparatus |
| US4396073A (en) * | 1981-09-18 | 1983-08-02 | Electric Power Research Institute, Inc. | Underground boring apparatus with controlled steering capabilities |
| GB8531382D0 (en) * | 1985-12-20 | 1986-02-05 | Kayes A G | Soil displacement hammer |
| US4834196A (en) * | 1987-06-22 | 1989-05-30 | Falgout Sr Thomas E | Well drilling tool |
| DE3735018C2 (de) * | 1987-07-25 | 1995-02-16 | Schmidt Paul | Rammbohrgerät |
| US4928776A (en) * | 1988-10-31 | 1990-05-29 | Falgout Sr Thomas E | Deviation control tool |
| US4895214A (en) * | 1988-11-18 | 1990-01-23 | Schoeffler William N | Directional drilling tool |
-
1990
- 1990-12-28 FR FR9016442A patent/FR2671130B1/fr not_active Expired - Fee Related
-
1991
- 1991-12-06 WO PCT/FR1991/000977 patent/WO1992012324A1/fr active IP Right Grant
- 1991-12-06 EP EP92901738A patent/EP0517874B1/fr not_active Expired - Lifetime
- 1991-12-06 CA CA002076627A patent/CA2076627A1/fr not_active Abandoned
- 1991-12-06 US US07/920,445 patent/US5305838A/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP0517874A1 (fr) | 1992-12-16 |
| FR2671130A1 (fr) | 1992-07-03 |
| FR2671130B1 (fr) | 1993-04-23 |
| US5305838A (en) | 1994-04-26 |
| WO1992012324A1 (fr) | 1992-07-23 |
| CA2076627A1 (fr) | 1992-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0517874B1 (fr) | Dispositif comportant deux elements articules dans un plan, applique a un equipement de forage | |
| EP2004946B1 (fr) | Dispositif d'orientation d'outils de forage | |
| CA1128925A (fr) | Raccord coude a angle variable pour forages diriges | |
| EP0376805B1 (fr) | Garniture de forage à trajectoire contrôlée comportant un stabilisateur à géométrie variable et utilisation de cette garniture | |
| CA2006920C (fr) | Equipement pour garniture de forage comportant un element a actionner, un moteur et des moyens de commande | |
| EP0886712A1 (fr) | Dispositif de protection et de guidage d'un composant allonge associe, au niveau de l'articulation, a deux elements rigides articules l'un a l'autre, et ses applications industrielles | |
| FR2577005A1 (fr) | Manchon-raccord a la cardan pour des systemes de canalisations | |
| CA1294604C (fr) | Dispositif de reglage a distance de l'orientation relative de deux troncons d'une colonne | |
| CA2006927C (fr) | Garniture de forage a trajectoire controlee comportant un element coude a angle variable et utilisation de cette garniture | |
| EP1283961A1 (fr) | Transmission a vis, ecrou et cable attache a la vis | |
| EP0013845A1 (fr) | Articulation à rotule pour bras polyarticulé | |
| FR2544422A1 (fr) | Dispositif d'accouplement a petit debattement pour arbres oscillants | |
| WO2011064467A1 (fr) | Composants de garniture de forage et train de composants | |
| EP0479228B1 (fr) | Clapet d'étranglement pour limiter les variations brusques de flux gazeux dans une conduite | |
| CA2382596C (fr) | Forage guide de puits | |
| WO2004113763A1 (fr) | Verin a vis et ecrou | |
| FR2722238A1 (fr) | Ensemble de mesure comportant des moyens d'orientation d'une partie des elements de mesure | |
| EP0275737A1 (fr) | Chalumeau à gaz à corps articulé et extensible | |
| EP0884505A1 (fr) | Dispositif de transmission de mouvements à levier pivotant et vanne incorporant un tel dispositif | |
| EP0042330B1 (fr) | Mécanisme d'accouplement homocinétique | |
| BE865955A (fr) | Perfectionnements aux installations de forage | |
| EP0843050B1 (fr) | Installation de forage comportant un engin de forage | |
| FR2827926A1 (fr) | Joint universel a croisillon double, centre | |
| CA2055481C (fr) | Dispositif de transmission etanche d'un mouvement de rotation, a soufflet metallique | |
| CA1254757A (fr) | Dispositif d'accouplement a denture pour arbres oscillants |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 19920814 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): GB IT NL |
|
| 17Q | First examination report despatched |
Effective date: 19930903 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): GB IT NL |
|
| ITF | It: translation for a ep patent filed |
Owner name: STUDIO CIONI & PIPPARELLI |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 19950321 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Effective date: 19960701 |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee |
Effective date: 19960701 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19961118 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19971206 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19971206 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20051206 |