EP0565502A1 - Pipe handling equipment and method for a rock drilling machine - Google Patents
Pipe handling equipment and method for a rock drilling machine Download PDFInfo
- Publication number
- EP0565502A1 EP0565502A1 EP93850062A EP93850062A EP0565502A1 EP 0565502 A1 EP0565502 A1 EP 0565502A1 EP 93850062 A EP93850062 A EP 93850062A EP 93850062 A EP93850062 A EP 93850062A EP 0565502 A1 EP0565502 A1 EP 0565502A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- drill
- feed beam
- tubes
- tube
- magazine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/20—Driving or forcing casings or pipes into boreholes, e.g. sinking; Simultaneously drilling and casing boreholes
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B19/00—Handling rods, casings, tubes or the like outside the borehole, e.g. in the derrick; Apparatus for feeding the rods or cables
- E21B19/20—Combined feeding from rack and connecting, e.g. automatically
Abstract
Description
- The present invention relates to the area of drilling in soil and rock, especially lining drill tube drilling with double drill tubes, and relates to a handling equipment for handling such drill tubes at the connection of the screw joints thereof and a method of operation of the handling equipment.
- At lining drill tube drilling in soil and rock, a technique with double drill tubes is often used, whereby the flush fluid is supplied to the drilling tip through the inner drill tube and the drilling mud is transported up to the ground in the space between the outer and the inner drill tube.
- There are several drilling methods on the market, which are based on this principle. The drilling is usually performed with heavy, crawling thread supported and chain fed rock drilling machines. The diameter of the drilling hole is often between 100 and 200 mm. The drilling takes place in dependence of the application, in different slopes against the horizontal plane and the drilling depth is seldom more than about 200 m.
- The drill tubes are usually interconnected with screw joints, which must be adapted for transmitting considerable torque and shock stresses. Of this reason, the drill rods are usually heavy and cumbersome to handle manually, especially at inclined drilling.
- Due to the fact that the drill tubes extend inside each other, problems arise at the joining of the drill tubes, since the joining takes place so that the outer and inner drill tubes are screwed on and off separately.
- Different assisting machines have been constructed for making easier the handling of the drill tubes and also for acting as magazines in such rock drilling machines. All such previously known devices suppose that the outer and inner drill tubes are handled each separately, whereby the lighter inner drill tubes are handled manually.
- The object of the present invention is to provide a handling equipment to be mounted at a conventional rock drilling machine, making possible to handle both the outer and the inner drill tubes machinally and providing a magazine for the drill tubes to be mounted or taken up. No manual handling of the drill tubes should be necessary.
- According to the invention such a handling equipment is installed at a rock drilling machine, comprising a feed beam adjustable to different slopes, a drifter which is moveable along the feed beam, and an adapter which connects the drifter to the upper end of the drill tubes for transmitting percussive and/or rotation power to such drill tubes. The handling equipment comprises a magazine for the drill tubes positioned beside the feed beam so that the drill tubes in the magazine are essentially parallel with the feed beam; a grip member for gripping the drill tubes; and operation means for moving a gripped drill tube to a drilling position at the feed beam for screwing on the adapter and possibly on drill tubes already in the hole.
- According to the invention, the magazine further comprises a spacing means for cooperation with one end of an inner drill tube positioned inside each outer drill tube in the magazine for spacing said one end of the inner drill tube from the corresponding end of the outer drill tube, and a gripping means for gripping the inner drill tube at the portion extending from the outer drill tube during the movement from the magazine to the drilling position at the feed beam.
- Said operation means comprises according to the invention a first operation device for moving in the horizontal direction parallel with the feed beam; a second operation device for moving in the vertical perpendicular to the feed beam; a third operation device for moving in the horizontal direction perpendicular to the feed beam; said operation devices being activated each separately and independent of the other.
- Moreover, the invention comprises a method of operating a handling equipment, comprising a feed beam adjustable to different slopes, a drifter which is moveable along the feed beam, and an adapter connecting the drifter to the upper end of the drill tubes for transmitting percussive and/or rotation power to such drill tubes, said handling equipment comprising a magazine for the drill tubes positioned beside the feed beam so that the drill tubes in the magazine are essentially parallel with the feed beam; a grip member for gripping the drill tubes; and operation means for moving a gripped drill tube to a drilling position at the feed beam for screwing on the adapter and possibly on drill tubes already in the hole. According to the invention the method comprises the following steps: providing several drill tube sets into said magazine, each set of drill tubes comprising an outer tube and an inner tube, the inner drill tube being positioned inside the outer drill tube and extending out from one end of the outer drill tube; gripping one outer drill tube at the middle thereof by said gripp member and at the same time gripping a corresponding innerdrill tube by a gripping means at the position of the inner drill tube extending outside the outer drill tube; and moving the outer and inner drill tubes simultaneously to an operating position at said feed beam for cooperation with the adapter and possibly outer and inner drill tubes already present in the hole.
- An alternative method according to the invention comprises the following steps: placing outer drill tubes and inner drill tubes separately in said magazine; gripping an inner drill tube by said gripp member and moving it into an operation at the feed beam for cooperation with the adapter and possibly an inner drill tube already present in the hole; gripping an outer drill tube by said gripp member and moving it to a position above the already mounted inner drill tube and moving it outside the inner drill tube for cooperation with the adapter and possibly an outer drill tube already present in the hole, whereby a gripping means can be dispensed with. In the last-mentioned method a simplified handling equipment can be used by omission of the gripping means in the nature of a shear-type gripper. The method supposes that the equipment has a sufficient feed lenght double of the lengths of the drill tubes.
- Further preferred embodiments will appear from the following description.
- The invention is described in more details below by means of preferred embodiments and with reference to the appended drawings.
- Fig. 1 is a schematic plan view of a preferred embodiment of the equipment according to the invention.
- Fig. 2 is a side view taken along line II - II in Fig. 1 and shows a cradle according to the invention.
- Fig. 3 is a side view taken along line III - III in Fig. 1 and shows a magazine according to the invention.
- Fig. 4 is a side view taken along line IV - IV in Fig. 1 and shows a spacing magazine for the upper ends of the inner drill tubes.
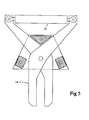
- Fig. 5 is a side view showing a shear-type gripper according to the invention.
- Fig. 6 is a schematic plan view similar to Fig. 1 and shows an alternative embodiment of the invention.
- The equipment for handling drill tubes is intended to be mounted on a rock drilling machine of conventional construction. In Fig. 1 only a few parts of the rock drilling machine is shown, viz. a
feed beam 3,fixture members drifter 20 for driving the drill tubes and anadapter 21 interconnecting the upper ends of the drill tubes with the drifter. Thefeed beam 3 can be adjusted into different slope angles in dependence of the direction of the intended drill hole. The actual drilling work takes place by means of thedrifter 20, which transmits percussive and rotation power via theadapter 21 to the drill tubes. The drifter is moved along the feed beam for example by means of chains. - Hereinbelow, the handling equipment according to the invention will be described in its rest position in which the feed beam is horizontal and the directions will be defined in view thereof. It is noted that the feed beam during operation is adjusted to the desired angle in relation to the ground for the intended drill hole and that the entire equipment according to the invention follows such movement. Said angle can be adjusted normally between 00 - 100° in relation to the horizontal plane.
- A preferred embodiment of the invention will now be described with particular reference to Figs. 1 and 2. The handling equipment comprises two
transverse support beams 1 attached to the bottom side of thefeed beam 3 and extending beside the feed beam. Twolongitudinal guide beams 2 are attached to thetransverse support beams 1 parallel with the feed beam. Theguide beams 2 are interconnected by severaltransverse members - Between said
transverse members 16, a cradle 4 is moveable along theguide beams 2 and parallel with the feed beam. Afirsthydraulic cylinder 5 is connected between the cradle and ontransverse support beam 1 for moving the cradle along the guide beams. - The cradle 4 is shown in more details in Fig. 2 which is a side view, however with a shear-type gripper 14 (to be described below) removed. The
transverse support beam 1, thelongitudinal guide beams 2 and thefeed beam 3 are shown by broken lines in Fig. 2. - The cradle 4 comprises two
longitudinal box members transverse beams longitudinal box members guide beams 2 and are moveable along the guide beams. - Attached to one
longitudinal box member 28 is apillar 6, which extends vertically upwards from the cradle. The pillar is constructed of two box girders extending telescopically inside each other. The inner box girder is extendable out from the outer box girder by means of an internal second hydraulic cylinder 7. - A
boom 8 is mounted to the upper end of the inner box girder of thepillar 6, and extends horizontally and perpendicular towards the feed beam. Theboom 8 is also constructed of two box girders telescopically extending inside each other and the relative movement takes place by means of a thirdhydraulic cylinder 9. - At the outer extendable part of the
boom 8, there is provided agrip claw 10 pivotable around an articulated bolt 11 by means of a fourthhydraulic cylinder 12. Moreover, there is an abutment in the form of anelongated plate 13, which in cross-section forms a right angle. Theplate 13 is attached to the moveable part of theboom 8 and extends in parallel with thefeed beam 3. - The
grip claw 10 is adapted, in cooperation with saidelongated plate 13, to grip and hold stationary a drill tube with different diameter normally within the interval of between 38 and 133 mm. Thegrip claw 10 urges the drill tubes against theelongated plate 13 thereby maintaining the drill tube parallel with the feed beam. - At the moveable part of the
boom 8, there is also attached arod 23 extending horizontally and parallel with thefeed beam 3, c.f. also Fig. 1. Therod 23 is telescopically extendable in the axial direction by means of a fifthhydraulic cylinder 25 and is constructed of two box girders telescopically extending inside each other. - At the free end of the
rod 23 is mounted a shear-type gripper 14 with a pertaining sixthhydraulic cylinder 15. The shear-type is shown in more details in Fig. 5. The shear-type gripper is positioned at a distance from thegrip claw 10 and the distance is adjustable by therod 23 by means of thehydraulic cylinder 25. - As mentioned above, there is provided transverse members at fixed positions along the guide beams 2. Two such transverse members are constructed as
magazine members 16 and one such magazine member is shown in more details in Fig. 3. The magazine member comprises atransverse beam 16 and four vertical U-beams 31 spaced apart in the transverse direction by a distance so thatouter drill tubes 33 can be placed in the space between two adjacent U-beams 31. In Fig. 3 there is shown twocompartments 32 for outer drill tubes each housing a maximum of four outer drill tubes. Each outer drill tube encloses aninner drill tube 34 as described in more details below. - The drill tubes are retained by means of plate springs 17 or spring loaded
holders 24 so that they cannot fall out from the magazine at vertical or so called negative drilling when thefeed beam 3 is vertical or slopes more than 90° in relation to the horizontal. - The
magazine members 16 are placed at a distance from each other corresponding to the length of the outer drill tubes. Preferably, each magazine member is positioned 0,2 - 0,4 meters from the end of the outer drill tubes, so that the distance between themagazine members 16 is as large as possible. Themagazine members 16 are preferably welded to the guide beams 2, but it is possible to have one (or several) of the magazine member 16 (the upper) adjustable or replaceable for adoption to drill tubes of different lengths and diameters. At the bottom end of the guide beams 2, there is placed anabutment plate 26, which prevents the drill tubes from moving in the axial direction when the feed beam is inclined. - To the left of the
left magazination member 16, in Fig. 1, there is mounted a spacingmember 18 shown in more details in Fig. 4, for cooperation with the upper end ofinner drill tubes 34 positioned inside the outer drill tubes in the magazine. Each inner drill tube is provided with ajointing sleeve 35 comprising screw windings for connection to a lower inner drill tube in the drill hole. Saidjointing sleeve 35 forms an enlargement of the upper end of each inner drill tube. Said spacingmember 18 comprises severalvertical rods 36 as shown in Fig. 4 spaced apart for engagement below the enlargement of thejointing sleeves 35 for preventing the inner drill tubes to enter inside the outer drill tubes. Thus, each inner drill tube extends out from or to the left of the outer drill tube as shown in Fig. 1. - The operation of the handling equipment according to the invention will now be described with reference to Figs. 1 and 2.
- When the drilling starts, the outer drill tubes are placed between the
magazine members 16 and the inner drill tubes are placed inside the outer drill tubes and hang in thespace member 18. The inner drill tubes are placed manually in the outer drill tubes or the shear-type gripper is used as described more closely below. - The first outer drill tube and the first inner drill tube are each provided with drill tips, normally with tungsten carbide tips, but other constructions can also be used together with the invention.
- By means of operation valves at the control panel of the drilling machine, all
hydraulic cylinders type gripper 14 is adjusted, in its open position, over the firstinner drill tube 34, immediately below itsjointing sleeve 35 between thespace member 18 and themagazine members 16. Theopen grip claw 10 is at the same time positioned over the correspondingouter drill tube 33 and approximately at its longitudinal middle point. Theboom 8 and the upper part of the pillar are now adjusted and moved against the drill tubes so that theplate 13 will be placed firmly against the outer side of the outer drill tube. Then, both thegrip claw 10 and the shear-type gripper 14 is activated by means of respective hydraulic cylinders, whereby both the inner drill tube and the outer drill tube are captured in a position parallel with thefeed beam 3. - By activation of
hydraulic cylinders feed beam 3 and down through thedrill tube guidings drifter 20, first the inner drill tube is screwed to the adapter, whereupon the shear-type gripper 14 is opened. Then, the outer drill tube is screwed to the adapter, whereupon thegrip claw 10 is opened. Both drill tubes are now connected to the adapter. At continued rotation of the adapter, the inner and outer drill tubes are screwed to the upper ends of corresponding drill tubes already placed in the drill hole guided by thedrill tube guidings - Both drill tubes are now connected to the drifter and the drilling starts. When the drifter has moved along the feed beam to its bottom position, the drill tubes are screwed off from the adapter by means of the drifter and a
drill tube releaser 22 of known construction at the lower end of the feed beam. Now, the drifter is moved to its upper position, whereupon a new length of outer and inner drill tubes are screwed on the drill tubes already inside the drill hole and so on. - At the taking up of the drill rod, the same operations are done as with the downwards drilling, but in opposite order, whereupon the grip claw and the shear-type gripper operate as an abutment when the drill tubes by means of the drifter are screwed off the adapter. Each loosened drill tube length is placed in position in the magazine between the U-beams 31 in the
magazine 16. - In several cases, there is drilled with double drill tube systems only to a part of the drill hole, whereupon the drilling continues with only the inner drill tubes. It often occurs that the inner drill tubes are taken up separately and that the outer drill rod is temporarily left in the earth. The
inner drill tubes 34 are then placed atacertain space 37 in the magazine between two U-beams 31 in the magazine, c.f. Fig. 3 to the left, from where they later by means of the equipment can be placed inside the outer drill tubes when these have arrived in place. - By using the shear-
type gripper 14, aninner drill tube 34 can be placed in position inside anouter drill tube 33 already placed in themagazine space 32 in the following way. The inner drill tube is positioned in thespace 37 to the left in Fig. 3. In order that the shear-type gripper 14 should be able to grip around the inner drill tube at the middle point thereof, the cradle 4 is moved to the far right in Fig. 1 and the shear-type gripper is withdrawn as far as possible towards the cradle 4. Then, the shear-type gripper will be positioned at the middle of the inner drill tube and one such drill tube is gripped and lifted from the magazine. Then, the cradle 4 is moved to the left in Fig. 1 at the same time as therod 23 is extended in its full length. By this movement, the inner drill tubes will be positioned to the left of the mouth of the outer drill tube positioned in the magazine and can be fed inside the outer drill tube by operating the pillar, the boom, therod 23 and the cradle 4. The inner drill tube can of course only be moved inside the outer drill tube to the half length thereof, but the continued movement takes place either with the gravitational force if the feed beam is sloping or by gripping the outer drill tube by the shear-type gripper at a position further out. - Several modifications of the handling equipment shown in Fig. 1 are obvious to a skilled person. A few modifications will be mentioned below but it is realized that several other modifications are within the scope of the invention.
- One alternative embodiment of the invention is shown in Fig. 6, which corresponds to Fig. 1. In this embodiment, the drill tubes are reversed so that the
enlarged jointing sleeve 35 is positioned downwards, to the right in Fig. 6. Also the direction of the shear-type gripper 14 is reversed. The spacing member is replaced by astop member 38 preventing theouter drill tubes 33 to reach theabutment plate 26. Instead theinner drill tubes 34 extend through the outer drill tubes and extend beyond thestop member 38 until theabutment plate 26. Thus, theinner drill tubes 33 can be gripped by the shear-type gripper 14 below theouter drill tubes 33. Otherwise the operation is the same and should be evident from Fig. 6. However, the adapter must be replaced by an alternative adapter, in which the screw windings cooperating with the inner drill tubes are made as inner windings in a hole 39 of the adapter. This construction is more rugged. In all other respects the same construction is used. - The above constructions can also be further modified. One possibility is to provide the
pillar 6 with a possibility to rotate around a vertical axis, so that therod 23 can be adjusted so that it is always parallel with the feed beam. - It is also possible to use the handling equipment according to the invention in other methods, e.g. by handing the outer and inner drill tubes separately. First an inner drill tube is gripped by the
grip claw 10 and placed in position atthe feed beam. The inner drill tube is connected to the adapter and screwed to the inner drill tube already in the hole. Then, the adapter is disengaged from the inner drill tube and the drifter and adapter is withdrawn to the left as much as possible. Then, an outer drill tube positioned in thespace 37 is gripped by thegrip claw 10 and moved to a position so that it can be placed outside the inner drill tube already present at the feed beam. Finally, the adapter again engages the upper end of the outer and inner drill tubes and the outer drill tube is at the same time screwed to the outer drill tube already in the hole. The drilling machine is now ready for continued work. It is obvious that the drifter and adapter must be moveable the double distance of the length of each of the drill tubes in this case. It is also obvious that an outer drill tube can be mounted before an inner drill tube. The shear-type gripper 14 is not used and can be removed if the equipment is to be used exclusively according to this method. - It is of course possible to adapt the invention to other types of drill tube handling equipments in which other types of engagement members are used instead of the grip claw and shear-type gripper.
- By using the above described handling equipment mounted on a machine for soil and rock drilling of standard construction and of the type described above, the following advantages are obtained:
- 1) The difficult and heavy work with more or less manually handling of heavy drill tubes at the drilling work is completely eliminated.
- 2) The drilling can be performed with one operator instead of at least two as previously required.
- 3) The time for the drilling work can be reduced considerably by faster handling of the drill tubes.
- 4) The accident hazard at the manual handling is eliminated.
- The above described embodiment has been used in practice and it has been shown that the operator very soon obtains a skill for how to use the different valves to the hydraulic cylinders and a very high precision can be obtained. If the inner drill tubes are placed inside the outer drill tubes by means of the shear-type gripper during the time the drilling machine performs work, several assembled inner and outer drill tubes are present for simultaneous movement to the working position and the connection to the adapter and the drill tubes already in the hole is very fast.
- It is possible to use modern technique for automatization of several of the movements necessary when operating the drill tube handler according to the invention. Thus, the valves to the hydraulic cylinders can be operated by a microprocessor in a certain sequence, which corresponds to a normal handling sequence. The operator can monitor the operation of the device and can intervene if necessary. It is also possible to place all controls of the valves in a operator cabin at the drilling machine so that the operator is conveniently placed in his normal operating chair.
- Other modifications occur to a skilled person reading this specification and the intent is that such modifications obvious to a skilled person should be encompassed within the scope of the invention. The invention is only limited by the appended patent claims.
Claims (10)
characterized in that the magazine further comprises
characterized in that the method comprises the following steps:
characterized in that it comprises the following steps:
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE9201119 | 1992-04-07 | ||
| SE9201119A SE500747C2 (en) | 1992-04-07 | 1992-04-07 | Equipment for handling and storage of drill pipes |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0565502A1 true EP0565502A1 (en) | 1993-10-13 |
| EP0565502B1 EP0565502B1 (en) | 1996-10-30 |
| EP0565502B2 EP0565502B2 (en) | 2000-07-26 |
Family
ID=20385898
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP93850062A Expired - Lifetime EP0565502B2 (en) | 1992-04-07 | 1993-03-30 | Pipe handling equipment and method for a rock drilling machine |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP0565502B2 (en) |
| DE (2) | DE69305678T3 (en) |
| DK (1) | DK0565502T4 (en) |
| SE (1) | SE500747C2 (en) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0685630A2 (en) * | 1994-06-01 | 1995-12-06 | Ing. G. Klemm Bohrtechnik GmbH | Mounting apparatus for dual drill pipe |
| GB2312006A (en) * | 1996-03-29 | 1997-10-15 | Charles Machine Works | Pipe handling device |
| EP0860582A1 (en) * | 1997-02-25 | 1998-08-26 | Hütte & Co. Bohrtechnik Gesellschaft mit beschränkter Haftung | Method and apparatus for drilling with dual tube drillstring |
| EP0984132A2 (en) * | 1998-09-02 | 2000-03-08 | The Charles Machine Works Inc | A system and a method for automatically controlling a pipe handling assembly for a horizontal boring machine |
| WO2001051760A2 (en) * | 2000-01-12 | 2001-07-19 | The Charles Machine Works, Inc. | System for automatically drilling and backreaming boreholes |
| WO2002016728A1 (en) * | 2000-08-23 | 2002-02-28 | Techmo Entwicklungs- Und Vertriebs Gmbh | Method and device for assembling, particularly for lengthening, a pipe or system of rods |
| DE10104337B4 (en) * | 2001-02-01 | 2006-04-20 | Gta Maschinensysteme Gmbh | Linkage change device for horizontal drilling rigs |
| WO2006061459A1 (en) * | 2004-12-07 | 2006-06-15 | Sandvik Mining And Construction Oy | Method for casing drilling, drilling unit and adapter device |
| DE10341437B4 (en) * | 2003-09-09 | 2012-02-23 | Klemm Bohrtechnik Zweigniederlassung Der Bauer Maschinen Gmbh | Drilling rig with boom magazine and boom manipulation device |
| WO2020190196A1 (en) * | 2019-03-21 | 2020-09-24 | Epiroc Rock Drills Aktiebolag | An apparatus, a method and a drilling rig for installing pipes in ground |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10108696B4 (en) * | 2001-02-23 | 2005-10-13 | Deilmann-Haniel Mining Systems Gmbh | Drilling machine for double-head and overlay drilling with a circular-arc boom |
| DE502006001190D1 (en) | 2006-03-07 | 2008-09-04 | Klemm Bohrtechnik Gmbh | Device for loading a drilling device and drill |
| CA3188439A1 (en) * | 2020-08-03 | 2022-02-10 | Tomas BUTTAZZONI FONTAINE | Platform for the storage, transport and handling of drilling or prospection rods of different lengths and diameters |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2730246A (en) * | 1951-11-03 | 1956-01-10 | Exxon Research Engineering Co | Apparatus for handling pipe in a derrick |
| US3734208A (en) * | 1971-08-19 | 1973-05-22 | Bucyrus Erie Co | Well drill transfer mechanism |
| US4102409A (en) * | 1975-12-11 | 1978-07-25 | Atlas Copco Aktiebolag | Rock drilling machine |
| US4117941A (en) * | 1976-04-01 | 1978-10-03 | Golar-Nor Offshore A/S | Device for handling and racking riser pipes and drill pipes |
| US4765401A (en) * | 1986-08-21 | 1988-08-23 | Varco International, Inc. | Apparatus for handling well pipe |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3901664A1 (en) † | 1989-01-20 | 1990-07-26 | Bauer Spezialtiefbau | METHOD FOR DRAWING EXTERNAL RODS |
-
1992
- 1992-04-07 SE SE9201119A patent/SE500747C2/en not_active IP Right Cessation
-
1993
- 1993-03-30 DK DK93850062T patent/DK0565502T4/en active
- 1993-03-30 DE DE1993605678 patent/DE69305678T3/en not_active Expired - Lifetime
- 1993-03-30 EP EP93850062A patent/EP0565502B2/en not_active Expired - Lifetime
- 1993-03-30 DE DE1993850062 patent/DE565502T1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2730246A (en) * | 1951-11-03 | 1956-01-10 | Exxon Research Engineering Co | Apparatus for handling pipe in a derrick |
| US3734208A (en) * | 1971-08-19 | 1973-05-22 | Bucyrus Erie Co | Well drill transfer mechanism |
| US4102409A (en) * | 1975-12-11 | 1978-07-25 | Atlas Copco Aktiebolag | Rock drilling machine |
| US4117941A (en) * | 1976-04-01 | 1978-10-03 | Golar-Nor Offshore A/S | Device for handling and racking riser pipes and drill pipes |
| US4765401A (en) * | 1986-08-21 | 1988-08-23 | Varco International, Inc. | Apparatus for handling well pipe |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0685630A2 (en) * | 1994-06-01 | 1995-12-06 | Ing. G. Klemm Bohrtechnik GmbH | Mounting apparatus for dual drill pipe |
| EP0685630A3 (en) * | 1994-06-01 | 1997-04-02 | Klemm Bohrtech | Mounting apparatus for dual drill pipe. |
| US6085852A (en) * | 1995-02-22 | 2000-07-11 | The Charles Machine Works, Inc. | Pipe handling device |
| GB2312006A (en) * | 1996-03-29 | 1997-10-15 | Charles Machine Works | Pipe handling device |
| DE19712641A1 (en) * | 1996-03-29 | 1997-10-30 | Charles Machine Works | Transfer device for pipe shots |
| GB2312006B (en) * | 1996-03-29 | 1999-10-27 | Charles Machine Works | Pipe handling device |
| DE19712641B4 (en) * | 1996-03-29 | 2007-07-26 | The Charles Machine Works Inc., Perry | Pipe transfer device and method for transporting several pipe sections |
| EP0860582A1 (en) * | 1997-02-25 | 1998-08-26 | Hütte & Co. Bohrtechnik Gesellschaft mit beschränkter Haftung | Method and apparatus for drilling with dual tube drillstring |
| EP0984132A2 (en) * | 1998-09-02 | 2000-03-08 | The Charles Machine Works Inc | A system and a method for automatically controlling a pipe handling assembly for a horizontal boring machine |
| US6179065B1 (en) | 1998-09-02 | 2001-01-30 | The Charles Machine Works, Inc. | System and method for automatically controlling a pipe handling system for a horizontal boring machine |
| EP0984132A3 (en) * | 1998-09-02 | 2003-01-08 | The Charles Machine Works Inc | A system and a method for automatically controlling a pipe handling assembly for a horizontal boring machine |
| US6550547B1 (en) | 1998-09-02 | 2003-04-22 | The Charles Machine Works, Inc. | System and method for automatically controlling a pipe handling system for a horizontal boring machine |
| WO2001051760A2 (en) * | 2000-01-12 | 2001-07-19 | The Charles Machine Works, Inc. | System for automatically drilling and backreaming boreholes |
| WO2001051760A3 (en) * | 2000-01-12 | 2002-03-07 | Charles Machine Works | System for automatically drilling and backreaming boreholes |
| WO2002016728A1 (en) * | 2000-08-23 | 2002-02-28 | Techmo Entwicklungs- Und Vertriebs Gmbh | Method and device for assembling, particularly for lengthening, a pipe or system of rods |
| DE10104337B4 (en) * | 2001-02-01 | 2006-04-20 | Gta Maschinensysteme Gmbh | Linkage change device for horizontal drilling rigs |
| DE10341437B4 (en) * | 2003-09-09 | 2012-02-23 | Klemm Bohrtechnik Zweigniederlassung Der Bauer Maschinen Gmbh | Drilling rig with boom magazine and boom manipulation device |
| WO2006061459A1 (en) * | 2004-12-07 | 2006-06-15 | Sandvik Mining And Construction Oy | Method for casing drilling, drilling unit and adapter device |
| US7617887B2 (en) | 2004-12-07 | 2009-11-17 | Sandvik Mining And Construction Oy | Method for casing drilling, drilling unit and adapter device |
| AU2005313303B2 (en) * | 2004-12-07 | 2010-06-10 | Sandvik Mining And Construction Oy | Method for casing drilling, drilling unit and adapter device |
| WO2020190196A1 (en) * | 2019-03-21 | 2020-09-24 | Epiroc Rock Drills Aktiebolag | An apparatus, a method and a drilling rig for installing pipes in ground |
Also Published As
| Publication number | Publication date |
|---|---|
| SE9201119L (en) | 1993-10-08 |
| DE69305678T3 (en) | 2000-11-16 |
| EP0565502B2 (en) | 2000-07-26 |
| DE565502T1 (en) | 1995-09-28 |
| DK0565502T3 (en) | 1997-02-17 |
| DE69305678D1 (en) | 1996-12-05 |
| DK0565502T4 (en) | 2000-09-18 |
| SE9201119D0 (en) | 1992-04-07 |
| EP0565502B1 (en) | 1996-10-30 |
| SE500747C2 (en) | 1994-08-22 |
| DE69305678T2 (en) | 1997-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0565502A1 (en) | Pipe handling equipment and method for a rock drilling machine | |
| AU706612B2 (en) | Blasthole drill with improved automatic breakout wrench | |
| US7537424B2 (en) | Apparatus and method for handling pipe sections | |
| US4051587A (en) | Pile handling apparatus and methods | |
| NO179052B (en) | Apparatus for centering a pipe part under a top drill for a drill | |
| US9540891B2 (en) | Device and method for handling drill string components and drill rig | |
| NO336391B1 (en) | A pipe | |
| NO335929B1 (en) | Method and apparatus for drilling with casing | |
| AU769454B2 (en) | Drill rod loader | |
| US6164391A (en) | Fixture for the production of bores with single or double rods | |
| US6615932B2 (en) | Arrangement in rock drilling apparatus | |
| CN109236212A (en) | Gripping mechanism for earth drilling machinery | |
| EA029885B1 (en) | Hydraulic-driven mobile drilling rig | |
| KR102126601B1 (en) | Gripper for drill string component handling device, method for manoeuvring a gripper, drill string component device and rock drill rig | |
| US4345493A (en) | Drill rod holding and break-out device | |
| US20210002968A1 (en) | Drilling tool replacement apparatus | |
| EP0860580A1 (en) | Apparatus for handling drill rods | |
| AT411781B (en) | METHOD AND DEVICE FOR ASSEMBLING, IN PARTICULAR EXTENDING, A TUBE OR. LINKAGE | |
| SE529285C2 (en) | Device and method for loosening a threaded joint during rock drilling | |
| NO317698B1 (en) | Device for feeding binder material | |
| AU2021384728B2 (en) | A rod handling system for drilling rigs | |
| AU719261B2 (en) | Blasthole drill and improved method of operation | |
| US4346631A (en) | Well pipe spinning and torqueing apparatus | |
| JP2504744Y2 (en) | Drilling rig | |
| CN113775294A (en) | Follow-up pipe shed construction device and construction method while drilling |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE DK |
|
| 17P | Request for examination filed |
Effective date: 19940412 |
|
| DET | De: translation of patent claims | ||
| 17Q | First examination report despatched |
Effective date: 19950817 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE DK |
|
| REF | Corresponds to: |
Ref document number: 69305678 Country of ref document: DE Date of ref document: 19961205 |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 |
|
| PLBQ | Unpublished change to opponent data |
Free format text: ORIGINAL CODE: EPIDOS OPPO |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| 26 | Opposition filed |
Opponent name: DEILMANN-HANIEL GMBH Effective date: 19970724 Opponent name: ING. G. KLEMM BOHRTECHNIK GMBH Effective date: 19970724 |
|
| PLBF | Reply of patent proprietor to notice(s) of opposition |
Free format text: ORIGINAL CODE: EPIDOS OBSO |
|
| PLBF | Reply of patent proprietor to notice(s) of opposition |
Free format text: ORIGINAL CODE: EPIDOS OBSO |
|
| PLBF | Reply of patent proprietor to notice(s) of opposition |
Free format text: ORIGINAL CODE: EPIDOS OBSO |
|
| PLAW | Interlocutory decision in opposition |
Free format text: ORIGINAL CODE: EPIDOS IDOP |
|
| PLAW | Interlocutory decision in opposition |
Free format text: ORIGINAL CODE: EPIDOS IDOP |
|
| PUAH | Patent maintained in amended form |
Free format text: ORIGINAL CODE: 0009272 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: PATENT MAINTAINED AS AMENDED |
|
| 27A | Patent maintained in amended form |
Effective date: 20000726 |
|
| AK | Designated contracting states |
Kind code of ref document: B2 Designated state(s): DE DK |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T4 |
|
| EN | Fr: translation not filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DK Payment date: 20120323 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20120322 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EUP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 69305678 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20130403 |