EP1451415B1 - Automatic bathroom flushers - Google Patents
Automatic bathroom flushers Download PDFInfo
- Publication number
- EP1451415B1 EP1451415B1 EP02784724A EP02784724A EP1451415B1 EP 1451415 B1 EP1451415 B1 EP 1451415B1 EP 02784724 A EP02784724 A EP 02784724A EP 02784724 A EP02784724 A EP 02784724A EP 1451415 B1 EP1451415 B1 EP 1451415B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- valve
- pressure
- fram
- valve device
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images


























Classifications
-
- E—FIXED CONSTRUCTIONS
- E03—WATER SUPPLY; SEWERAGE
- E03D—WATER-CLOSETS OR URINALS WITH FLUSHING DEVICES; FLUSHING VALVES THEREFOR
- E03D3/00—Flushing devices operated by pressure of the water supply system flushing valves not connected to the water-supply main, also if air is blown in the water seal for a quick flushing
- E03D3/02—Self-closing flushing valves
- E03D3/06—Self-closing flushing valves with diaphragm valve and pressure chamber for retarding the valve-closing movement
-
- E—FIXED CONSTRUCTIONS
- E03—WATER SUPPLY; SEWERAGE
- E03D—WATER-CLOSETS OR URINALS WITH FLUSHING DEVICES; FLUSHING VALVES THEREFOR
- E03D5/00—Special constructions of flushing devices, e.g. closed flushing system
- E03D5/10—Special constructions of flushing devices, e.g. closed flushing system operated electrically, e.g. by a photo-cell; also combined with devices for opening or closing shutters in the bowl outlet and/or with devices for raising/or lowering seat and cover and/or for swiveling the bowl
- E03D5/105—Special constructions of flushing devices, e.g. closed flushing system operated electrically, e.g. by a photo-cell; also combined with devices for opening or closing shutters in the bowl outlet and/or with devices for raising/or lowering seat and cover and/or for swiveling the bowl touchless, e.g. using sensors
Definitions
- the present invention is directed to valve devices for bathroom flushers and methods for operating and controlling fluid flow in such flushers.
- Automatic flow-control systems have become increasingly prevalent, particularly in public rest-room facilities, both toilets and urinals.
- Automatic faucets and flushers contribute to hygiene, facility cleanliness, and water conservation.
- object sensors detect the user and operate a flow-control valve in response to user detection.
- an automatic faucet for instance, presence or motion of a user's hands in the faucet's vicinity normally results in flow from the faucet.
- an automatic flusher detection of the fact that a user has approached the facility and then left is typically what triggers flushing action.
- GB Patent 1532210 identified as the closest prior art, discloses valve assemblies for controlling fluid flow from a pressurized supply.
- the valve assembly shown in Figs. 1 to 3 of GB 1532210 has a valve housing built up from three interfitting parts and including an inlet port and an outlet port.
- the valve assembly also includes a flexible diaphragm clamped around its periphery within the housing to divide the housing into an inlet chamber connecting the inlet port via a through-flow chamber with the outlet port, and a back-pressure chamber.
- the central part of the diaphragm is formed as a valve member, which engages seating to close off the through-flow chamber from the inlet chamber and so effectively close off the outlet of the valve.
- a bush Located at the centre of the diaphragm is a bush having an axial bore connecting the inlet chamber to the back-pressure chamber.
- EP publication EP 0848193 discloses in Figs. 1 - 4 a valve including a rigid valve body with a flow inlet opening and one flow outlet, which are oriented in a substantially cross way to said inlet opening.
- the body of the valve has a main cavity between the flow inlet and outlet with a valve seat in the limit of the main cavity and the flow inlet.
- the body of the valve has one or more ducts for the control flow inlet, and one or more ducts for the outlet of the same which are associated with the control flow transfer means of the valve. These inlet ducts of control flow may be supplied from a network which is independent from the main flow.
- the valve has an elastomeric body in charge of regulating the flow by its opening or closing, depending on the difference of pressures produced between its walls.
- the elastomeric body is located inside the main cavity of the valve, wherein the elastomeric body is hollow and opened in one of its axial ends.
- This elastomeric body is made up of at least two coaxial zones: a sealing zone and a zone of radial sealing.
- Figs. 5 - 10 disclose different embodiments of the valve, which embodiments also include a mobile axial stem.
- the mobile axial stem 35.3 is movable with respect to the valve body and slides with the elastomeric body. This movability of the mobile axial stem enables additional valve control of the elastomeric body regulating the flow of fluid.
- PCT Publication WO 97/04262 discloses a hydraulic valve with two control connections.
- the valve includes a valve seat, located in the control bore between the two control connections, and a control piston having a piston shaft.
- the piston shaft is guided concentrically in the control bore and passes through the valve seat.
- the control piston is provided with a central collar which closes off the control bore at the adjacent end, and is guided inside the valve housing so as to form a seal.
- the control piston has an end collar with a sealing surface facing the central collar. This forms a sealing face that matches a sealing face located on the valve seat, which faces the first control connection, so that the control piston and valve seat co-operate in the closure direction from the first control connection to the second.
- US Patent 3429333 discloses ball cocks for controlling flow of water in toilet flush tanks.
- US Patent 4488702 discloses a metering valve, or a flush valve, which incorporates a rolling diaphragm mechanism of a cylindrical elastromeric material providing a smoothly transitioning flow rate control from the full open to the full close position.
- the rolling diaphragm sealing means is actuated by a floating cup driven by the differential pressure between the valve fluid inlet and an intermediate actuation control chamber.
- the valve control is spring biased to the normally closed position and is actuated by dumping all fluid from the control chamber through a poppet mechanism. After dumping the fluid, the actuating cup is compressed by the pressure of the inlet fluids to roll the diaphragm to a substantially open position.
- a metering orifice within the actuating cup passes fluid from the inlet at a controlled rate to the metering chamber, which, is gradually filled with fluid and expands moving the rolling diaphragm towards the sealingly closed position.
- the rolling diaphragm forms an upward extension of the inner wall of the metering chamber lower section and is sealingly connected at a line adjacent to a joint f the metering chamber lower section and the upper valve body.
- the rolling diaphragm vertically arises to and is hermetically sealed at an upper end to the perimeter of the rolling diaphragm metering valve diaphragm actuating cup.
- the position of the diaphragm actuating cup controls the upward extension of the rolling diaphragm, which is affixed to the lower end of the cup 29.
- US Patent 4505450 discloses a diaphragm type valve for irrigation purposes or industrial purposes where it is desirable to control large amounts of flow energy with a small control signal.
- the valve includes a diaphragm chamber into which fluid is introduced to establish a fluid pressure, which normally forces the diaphragm of a diaphragm assembly against an annular seat in the valve to maintain the valve in a closed condition.
- a stationary bleed tube is provided which extends through the diaphragm into the diaphragm chamber.
- the diaphragm assembly is mounted in a body of the valve, and it includes an integral annular sealing bead tightly held between a cap and the body using a nut.
- the valve When the diaphragm chamber is drained sufficiently to reduce the pressure therein to a point at which the diaphragm assembly is forced off the valve seat by the upstream fluid pressure, and the valve is opened. After some delay, the fluid is introduced into the diaphragm chamber due to the upstream fluid pressure forcing the fluid through a restricted annular passage between the bleed tube and a guide mounted on the diaphragm. The movement of the diaphragm causes the guide to move up and down with respect to the bleed tube to provide a self-cleaning action in the annular passage.
- US Patent 4911401 discloses a valve having a flexible diaphragm assembly that seals against the valve seat.
- the valve also includes a bleed assembly that extends into a pressure chamber located above the diaphragm for bleeding fluid pressure out of the chamber, thereby opening the valve.
- the bleed assembly includes a hollow tube inserted into a plastic plunger seat that is carried on the cap of the valve beneath the plunger of an actuating solenoid.
- Such a bleed assembly does not need a bleed tube having a precisely controlled length, and is not sensitive to flexure of the cap.
- the diaphragm assembly includes a cup shaped rubber diaphragm having an annular peripheral edge that is tightly clamped between the valve body and a cap of the valve when a nut is tightened thus fixedly holding the peripheral edge.
- a bathroom flusher includes a body, a valve assembly, and an actuator.
- the body has an inlet and an outlet, and the valve assembly is located in the body and positioned to close water flow between the inlet and the outlet upon sealing action of a moving member at a valve seat thereby controlling flow from the inlet to the outlet.
- the actuator actuates operation of the moving member.
- the moving member may be a high flow rate fram member, or a standard diaphragm, or a piston.
- the bathroom flusher may further include an infra-red sensor assembly for detecting a urinal or toilet user.
- the bathroom flusher may further include different types of electromechanical, hydraulic, or only mechanical actuators.
- a bathroom flusher includes a cover mounted upon said body and defining a pressure chamber with the valve assembly.
- the bathroom flusher may further include a flexible member fixed relative to the cover at one end thereof, the other end of the flexible member being attached to a movable member of the valve assembly, wherein there is a passage in said flexible member arranged to reduce pressure in said pressure chamber.
- the flexible member may be a hollow tube.
- the bathroom flusher may include an automatic flow-control system.
- the automatic flow-control system may employ infrared-light-type object sensors.
- an IR source typically an infrared-light-emitting diode
- an infrared-light-transmitting aperture as to transmit the infrared light into a target region.
- the indicator may be a visible-light-emitting diode included in an LED-combination device in which it is connected antiparallel to the infrared-light-emitting diode.
- the automatic flusher employs an infrared-light-type object sensor for providing an output on the basis of which a control circuit decides whether to flush a toilet. After each pulse of transmitted radiation, the control circuit determines if the resultant percentage of reflected radiation differs significantly from the last, and determines whether the percentage change was positive or negative. From the determined subsequent data having a given direction and the sums of the values, the control circuit determines whether a user has approached the facility and then withdrawn from it. Based on this determination, the controller operates the flusher's valve.
- the control circuit determines the flush criteria based on whether a period in which the reflection percentage decreased (in accordance with appropriate withdrawal criteria) has been preceded by a period in which the reflection percentage increased (in accordance with appropriate approach criteria). In this embodiment, the control circuit does not base its determination of whether the user has approached the toilet on whether the reflection percentage has exceeded a predetermined threshold, and it does not base a determination of whether the user has withdrawn from the toilet on whether the reflection percentage has fallen below a predetermined threshold.
- the automatic flushers may include an object sensor (e.g., an IR sensor) and a manual a push button actuator.
- the push button When the flusher is operational, the push button is designed for a user to provide signal to the control circuit to open the flusher's valve. However, if the button actuator has been pressed continually for an extended period, the control circuit assumes a sleep mode, in which its power consumption is negligible.
- a storage or shipping container may be designed to activate the button actuator while the container is closed. As a consequence, the flusher can be packed with the control circuit's batteries installed without draining those batteries significantly during shipping and storage.
- the storage or shipping container may include an external magnet cooperatively arranged together with a reed sensor connected to the control circuit. If the magnet continually activates the reed sensor for an extended period, the control circuit assumes the sleep mode, in which its power consumption is negligible.
- the control circuit assumes the sleep mode, in which its power consumption is negligible.
- sleep mode inducing devices that allow batteries to be installed without draining battery power significantly during the shipping and storage.
- the present invention is a novel valve device and the corresponding method for controlling flow-rate of fluid between the input and output ports of the valve device.
- a novel valve device includes a fluid input port and a fluid output port, a valve body, and a fram assembly.
- the valve body defines a valve cavity and includes a valve closure surface.
- the fram assembly provides two pressure zones and is movable within the valve cavity with respect a guiding member.
- the fram assembly is constructed to move to an open position enabling fluid flow from the fluid input port to the fluid output port upon reduction of pressure in a first of the two pressure zones and is constructed to move to a closed position, upon increase of pressure in the first pressure zone, creating a seal at the valve closure surface.
- the two pressure zones are formed by two chambers separated by the fram assembly, wherein the first pressure zone includes a pilot chamber.
- the guiding member may be a pin or internal walls of the valve body.
- the fram member may include a pliable member and a stiff member, wherein the pliable member is constructed to come in contact with a valve closure surface to form seal (e.g., at a sealing lip located at the valve closure surface) in the closed position.
- the valve device may include a bias member.
- the bias member is constructed and arranged to assist movement of the fram member from the open position to the closed position.
- the bias member may be a spring.
- the valve is controlled, for example, by an electromechanical operator constructed and arranged to release pressure in the pilot chamber and thereby initiate movement of the fram assembly from the closed position to the open position.
- the operator may include a latching actuator (as described in U.S Patent 6,293,516), a non-latching actuator (as described in U.S Patent 6,305,662), or an isolated operator (as described in PCT Application PCT/US01/51098 ).
- the valve may also be controlled may also including a manual operator constructed and arranged to release pressure in the pilot chamber and thereby initiate movement of the fram member from the closed position to the open position.
- the novel valve device including the fram assembly may be used to regulate water flow in an automatic or manual bathroom flusher.
- the electromagnetic actuator includes a solenoid wound around an armature housing constructed and arranged to receive an armature including a plunger partially enclosed by a membrane.
- the armature provides a fluid passage for displacement of armature fluid between a distal part and a proximal part of the armature thereby enabling energetically efficient movement of the armature between open and closed positions.
- the membrane is secured with respect to the armature housing and is arranged to seal armature fluid within an armature pocket having a fixed volume, wherein the displacement of the plunger (i.e., distal part or the armature) displaces the membrane with respect to a valve passage thereby opening or closing the passage. This enables low energy battery operation for a long time.
- the actuator may be a latching actuator (including a permanent magnet for holding the armature) of a non-latching actuator.
- the distal part of the armature is cooperatively arranged with different types of diaphragm membranes designed to act against a valve seat when the armature is disposed in its extended armature position.
- the electromagnetic actuator is connected to a control circuit constructed to apply said coil drive to said coil in response to an output from an optional armature sensor.
- the armature sensor can sense the armature reaching an end position (open or closed position).
- the control circuit can direct application of a coil drive signal to the coil in a first drive direction, and in responsive to an output from the sensor meeting a predetermined first current-termination criterion to start or stop applying coil drive to the coil in the first drive direction.
- the control circuit can direct or stop application of a coil drive signal to the coil responsive to an output from the sensor meeting a predetermined criterion.
- a valve device may includee an assembly of an electromagnetic actuator and a piloting button.
- the piloting button has an important novel function for achieving consistent long-term piloting of a main valve.
- the present invention is also a novel method for assembling a pilot-valve-operated automatic flow controller that achieves a consistent long-term performance.
- Method of assembling a pilot-valve-operated automatic flow controller includes providing a main valve assembly and a pilot-valve assembly including a stationary actuator and a pilot body member that includes a pilot-valve inlet, a pilot-valve seat, and a pilot-valve outlet.
- the method includes securing the pilot-valve assembly to the main valve assembly in a way that fluid flowing from a pressure-relief outlet of the main valve must flow through the pilot-valve inlet, past the pilot-valve seat, and through the pilot-valve outlet, whereby the pilot-valve assembly is positioned to control relief of the pressure in the pressure chamber (i.e., pilot chamber) of the main valve assembly.
- the main valve assembly includes a main valve body with a main-valve inlet, a main-valve seat, a main-valve outlet, a pressure chamber (i.e., a pilot chamber), and a pressure-relief outlet through which the pressure in the pressure chamber (pilot chamber) can be relieved.
- a main valve member e.g., a diaphragm, a piston, or a fram member
- a main valve member is movable between a closed position, in which it seals against the main-valve seat thereby preventing flow from the main inlet to the main outlet, and an open position, in which it permits such flow.
- the main valve member is exposed to the pressure in the pressure chamber (i.e., the pilot chamber) so that the pressurized pilot chamber urges the main valve member to its closed position, and the unpressurized pilot chamber (when the pressure is relieved using the pilot valve assembly) permits the main valve member to assume its open position.
- the pressure chamber i.e., the pilot chamber
- the electromagnetic actuator system includes an actuator, a controller, and an actuator sensor.
- the actuator includes a solenoid coil and an armature housing constructed and arranged to receive in a movable relationship an armature.
- the controller is coupled to a power driver constructed to provide a drive signal to the solenoid coil for displacing the armature and thereby open or close a valve passage for fluid flow.
- the actuator sensor is constructed and arranged to sense a position of the armature and provide a signal to the controller.
- the senor is constructed to detect voltage induced by movement of the armature.
- the sensor is constructed and arranged to detect changes to the drive signal due to the movement of the armature.
- the senor includes a resistor arranged to receive at least a portion of the drive signal, and a voltmeter constructed to measure voltage across the resistor.
- the sensor includes a resistor arranged to receive at least a portion of the drive signal, and a differentiator receiving current flowing through the resistor.
- the senor includes a coil sensor constructed and arranged to detect the voltage induced by movement of the armature.
- the coil sensor may be connected in a feedback arrangement to a signal conditioner providing conditioned signal to the controller.
- the signal conditioner may include a preamplifier and a low-pass filter.
- the system includes two coil sensors each constructed and arranged to detect the voltage induced by movement of the armature.
- the two coil sensors may be connected in a feedback arrangement to a differential amplifier constructed to provide a differential signal to the controller.
- the actuator sensor includes an optical sensor, a capacitance sensor, an inductance sensor, or a bridge for sensitively detecting a signal change due to movement of the armature.
- the actuator may have the armature housing constructed and arranged for a linear displacement of the armature upon the solenoid receiving the drive signal.
- the actuator may be a latching actuator constructed to maintain the armature in the open passage state without any drive signal being delivered to the solenoid coil.
- the latching actuator may include a permanent magnet arranged to maintain the armature in the open passage state.
- the latching actuator may further include a bias spring positioned and arranged to bias the armature toward an extended position providing a close passage state without any drive signal being delivered to the solenoid coil.
- the controller may be constructed to direct the power driver to provide the drive signal at various levels depending on the signal from the actuator sensor.
- the drive signal may be current.
- the system may include a voltage booster providing voltage to the power driver.
- the controller may be constructed to direct the power driver to provide the drive signal in a first drive direction and thereby create force on the armature to achieve a first end position.
- the controller is also constructed to determine whether the armature has moved in a first direction based on signal from the actuator sensor; and if the armature has not moved within a predetermined first drive duration, the controller directs application of the drive signal to the coil in the first direction at an elevated first-direction drive level that is higher than an initial level of the drive signal.
- the controller may be constructed to trigger the power driver to provide the drive signal in a first drive direction and thereby create force on the armature to achieve a first end position.
- the controller is also constructed to determine whether the armature has moved in a first direction based on signal from the actuator sensor, and if the armature has moved, the controller directs application of the drive signal to the coil in the first direction at a first-direction drive level that is being lower than an initial level of the drive signal.
- the actuator system may include the controller constructed to determine a characteristic of the fluid at the passage based on the signal from the actuator sensor.
- the characteristic of the fluid may be pressure, temperature, density, or viscosity.
- the actuator system may include a separate a temperature sensor for determining temperature of the fluid.
- the actuator system may include the controller constructed to determine a pressure of the fluid at the passage based on the signal from the actuator sensor.
- the actuator system may receive signals from an external motion sensor or a presence sensor coupled to the controller.
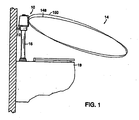
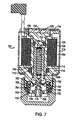
- a flusher 10 receives pressurized water from a supply line 12 and employs an object sensor, typically of the Infrared variety, to respond to actions of a target within a target region 14 by selectively opening a valve that permits water from the supply line 12 to flow through a flush conduit 16 to the bowl of a toilet 18.
- Fig. 1A illustrates a flusher 10 for automatically flushing a urinal 18A.
- flusher 10 receives pressurized water from supply line 12 and employs the object sensor to respond to actions of a target within a target region 14A by selectively opening a valve that permits water from the supply line 12 to flow through the flush conduit 16 to the urinal 18A.
- FIGs. 2A and 2B illustrate in detail a first embodiment of automatic flusher 10.
- Fig. 2B shows supply line 12, which communicates with an annular entrance chamber 20 defined by an entrance-chamber wall 22 formed near the flush conduit 16's upper end.
- a pressure cap 24 secured by a retaining ring 25 to the chamber housing clamps between itself and that housing the outer edge 26 of a flexible diaphragm 28 seated on a main valve seat 30 formed by the flush conduit 16's mouth.
- the supply pressure that prevails In the entrance chamber 20 tends to unseat the flexible diaphragm 28 and thereby cause it to allow water from the supply line 12 to flow through the entrance chamber 20 Into the flush conduit 16's interior 32. But the diaphragm 28 ordinarily remains seated because of pressure equalization that a bleed hole 34 formed by the diaphragm 28 tends to permit between the entrance chamber 20 and a main pressure chamber 36 formed by the pressure cap 24.
- the pressure that thereby prevails in that upper chamber 36 exerts greater force on the diaphragm 28 than the same pressure within entrance chamber 20 does, because the entrance chamber 20's pressure prevails only outside the flush conduit 16, whereas the pressure in the main pressure chamber 36 prevails everywhere outside of a through-diaphragm feed tube 38.
- the flusher also include a solenoid-operated actuator assembly, that can include any known solenoid or can include an actuator assembly 40 described in U.S Patents 6,293,516 or 6,305,662.
- the solenoid-operated actuator assembly includes an isolated actuator assembly 40A described in detail in PCT Application PCT/US01/51098, filed on October 25, 2001 , which is incorporated by reference as if fully reproduced herein.
- the isolated actuator assembly 40A is also in this application called a sealed version of the operator.
- the solenoid-operated actuator assembly 40 controlled by circuitry 42 relieves the pressure in the main pressure chamber 38 by permitting fluid flow, in a manner to be described in more detail below, between pilot entrance and exit passages 44 and 46 formed by the pressure cap 24's pilot-housing portion 48. A detailed description of operation is provided below.
- Fig. 3 (formed by Figs. 2A and 3B) illustrates in detail a second embodiment of automatic flusher 10.
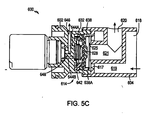
- This embodiment uses a novel high flow rate valve 600 (shown in Fig. 3B) utilizing a fram assembly described in detail in connection with Fig. 5C below.
- automatic flusher 10 receives water input from supply line 12, which is in communication with a pliable member 628 supported by a support member 632 of a fram member. Grooves 638 and 638A provide water passages to a pilot chamber 642. The actuator relieves pressure in pilot chamber 642 and thus initiate opening of valve 600. Then water flows from input supply line 12 by a valve seat 625 to output chamber 32. The entire flushing cycle is controlled by the solenoid-operated actuator assembly 40 controlled by circuitry 42, shown in Fig. 2A. A detailed description of operation is provided below.
- Fig. 4 illustrates in detail a third embodiment of automatic flusher 10.
- Automatic flusher 10 is a high performance, electronically controlled or manually controlled tankless flush system. Water enters thru input union 12 (supply line), preferably made of a suitable plastic resin. Union 12 is attached via thread to input fitting 12A that interacts with the building water supply system. Furthermore, union 12 is designed to rotate on its own axis when no water is present so as to facilitate alignment with the inlet supply line.
- union 12 is attached to an inlet pipe 64 by a fastener 60 and a radial seal 62, which enables union 12 to move in or out along inlet pipe 64. This movement can align the inlet to the supply line. However, with fastener 60 secured, there is pressure applied by the junction of union 12 to inlet 60. This forms a unit that is rigid and sealed through seal number 62. The water supply travels through union 12 to inlet 64 and thru the inlet valve assembly in the direction of elements 76, 78, 70, 72, and 74.
- Automatic flusher 10 also includes an inlet screen filter 80, which resides in a passage formed by member 82 and is in communication with a main valve seat 525, the operation of the entire main valve is described in connection with Figs. 5, 5A and 5B.
- an electro-magnetic actuator 50 controls operation of the main valve.
- water flows between main valve seat 525 and a fram element 528 thru passage 528' thru passage 528A thru passage 528B into main outlet 32.
- the fram element 526 seals the valve main seat 525.
- Automatic flusher 10 includes an adjustable input valve 72 controlled by rotation of a valve element 52 threaded together with valve elements 514 and 540, which are sealed from body 54 via o-ring seals 84 and 54.
- Valve elements 514 and 540 assembly are held down by threaded element 52, when element 52 is threaded all the way. The resulting force presses down element 82 on valve element 72 therefore creating a path from inlet 78 to passage of body 82.
- valve assembly 514 and 540 moves up due to the force of the spring located in the adjustable valve 70. The spring force combined with inlet fluid pressure from 78 forces element 72 against seat 72A resulting in a sealing action.
- Seal element 74 blocks the flow of water to inner passage of 82, which in turn enables servicing of all internal valve element including elements 82, 50, 514, 500, and 528 without the need to shut off the water supply at the inlet 12. This is a major advantage of this embodiment.
- valve body elements 514 and 82 are fastened part way resulting in valve body elements 514 and 82 to push down valve seat 72 only partly.
- valve body elements 514 and 82 there is a partial opening that provides a flow restriction reducing the flow of input water thru valve 70.
- This novel function is designed to meet application specific requirements.
- the inner surface of valve body 54 includes application specific marks such as 1.6 W.C 1.0 GPF urinals etc.
- Automatic flusher 10 includes a sensor-based electronic flush system located in housing 144 and described in connection with Fig. 2A. Furthermore, the sensor-based electronic flush system may be replaced by an all mechanical activation button or lever. Alternatively, the flush valve may be controlled by a hydraulically timed mechanical actuator that acts upon a hydraulic delay arrangement. Such hydraulic system can reside in housing 144. The hydraulic system can be adjusted to a delay period commiserate with the needed flush volume for a given fixture such a 1.6 GPF W.C etc. The hydraulic delay mechanism can open the outlet orifice of the pilot section instead of electro-magnetic actuator 50 (shown in Fig. 4) for duration equal to the installer preset value.
- control circuitry 42 can be modified so that the sensory elements housed in housing 144 are replaced with a timing control circuit.
- the control circuitry Upon activation of the flusher by an electro-mechanical switch (or a capacitance switch), the control circuitry initiates a flush cycle by activating electro-magnetic actuator 50 for duration equal to the preset level. This level can be set at the factory or by the installer in the field. This arrangement can be combined with the static pressure measurement scheme described below for compensating the pressure influence upon the desired volume per each flush.
- the embodiment of Fig. 4 has several advantages.
- the hydraulic or the electro-mechanical control system can be serviced without the need to shut off the water supply to the unit.
- the valve mechanism enables controlling the quantity of fluid that is passed thru the unit.
- the main flush valve includes the design shown in detail in connection with Figs. 5. 5A, and 5B. This flush valve arrangement provides for a high flow rate (for its valve size) when compared to conventional diaphragm type flush valves, as shown in Fig. 2B.
- Fig. 4 provides fluid control valves in combination with a low power bi-stable electro magnetic actuator that combined with the described control circuitry can precisely control the delivered water volume per each flush.
- the capability of measuring fluid static pressure and in turn altering the main valve open time controls dynamically the delivered volume. That is, this system can deliver a selected water volume regardless of the pressure variation in the water supply line.
- the system can include a flexible conducting spring contact arrangement for converting electrical control signals from the control electronics to the electro magnetic actuator without the use of a wire/connector arrangement.
- the system can also enable actuation of the main flush valve using a direct mechanical lever or a mechanical level actuating upon a hydraulic delay arrangement that in turn acts upon the main valve pilot arrangement.
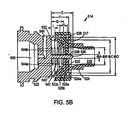
- Valve device 500 includes a valve body 513 providing a cavity for a valve assembly 514, an input port 518, and an output port 520.
- Valve assembly 514 includes a proximal body 522, a distal body 524, and a fram member 526 (Fig. 5A).
- Fram member 526 includes a pliable member 528 and a support member 532.
- Pliable member 528 may be a diaphragm-like member with a sliding seal 530.
- Support member 532 may be plunger-like member or a piston like member, but having a different structural and functional properties that a conventional plunger or piston.
- Valve assembly 514 also includes a guiding member such as a guide pin 536 or sliding surfaces, and includes a spring 540.
- Proximal body 522 includes threaded surface 522A cooperatively sized with threaded surface 524A of distal body 524.
- Fram member 526 (and thus pliable member 528 and a plunger-like member 532) includes an opening 527 constructed and arranged to accommodate guiding pin 536.
- Fram member 526 defines a pilot chamber 542 arranged in fluid communication with actuator cavity 550 via control passages 544A and 544B.
- Actuator cavity 550 is in fluid communication with output port 520 via a control passage 546.
- Guide pin 536 includes a V-shaped or U-shaped groove 538 shaped and arranged together with fram opening 527 (FIG. 5A) to provide a pressure communication passage between input chamber 519 and pilot chamber 542.
- distal body 524 includes an annular lip seal 525 arranged, together with pliable member 528, to provide a seal between input port chamber 519 and output port chamber 521.
- Distal body 524 also includes one or several flow channels 517 providing communication (in open state) between input chamber 519 and output port chamber 521.
- Pliable member 528 also includes sealing members 529A and 529B arranged to provide a sliding seal, with respect to valve body 522, between pilot chamber 542 and output port chamber 521.
- seals 529A and 529B Fig. 5). This seal may be one-sided as seal 530 (shown in FIG. 5A) or two-sided seal 529a and 529b shown in FIG. 5.
- there are various additional embodiments of the sliding seal including O-ring etc.
- valve device 10 having various sizes.
- the overall height of the valve is about 1.39" and diameter is about 1.178".
- the "half size” embodiment (of the valve shown In FIG. 2) has the following dimensions provided with the same reference letters (each also including a subscript 1) shown in FIG. 2.
- a 1 0.070
- B 1 0.30
- C 1 0.560
- D 1 0.650
- E 1 0.38
- F 1 0.310
- G 1 0.215
- H 1 0.125
- I 1 0.60
- the overall length of the 1/2 embodiment is about 1.350" and the diameter is about 0.855".
- the valve devices of FIG. 5B or 5C may have various larger or smaller sizes.
- valve 500 receives fluid at input port 518, which exerts pressure onto diaphragm-like members 528 providing a seal together with a lip member 525 in a closed state.
- Groove passage 538 provides pressure communication with pilot chamber 542, which is in communication with actuator cavity 550 via communication passages 544A and 544B.
- An actuator (shown in Figs. 4A. 5C) provides a seal at surface 548 thereby sealing passages 544A and 544B and thus pilot chamber 542.
- fluid flows via passages 544A and 544B to control passage 546 and to output port 520.
- This causes pressure reduction in pilot chamber 542. Therefore, diaphragm-like member 528 and piston-like member 532 move linearly within cavity 542, thereby providing a relatively large fluid opening at lip seal 525.
- a large volume of fluid can flow from input port 518 to output port 520.
- pilot chamber 542 When the plunger of actuator 142 or 143 seals control passages 544A and 544B, pressure builds up in pilot chamber 542 due to the fluid flow from input port 518 through groove 538.
- diaphragm-like pliable member 528 seals input port chamber 519 at lip seal 525.
- soft member 528 is designed to clean groove 538 of guide pin 536 during the sliding motion.
- valve 500 having input chamber 519 (and guide pin 536) symmetrically arranged with respect to passages 544A, 544B and 546 (and the location of the plunger of actuator 701.
- valve device 500 may have input chamber 519 (and guide pin 536) non-symmetrically arranged with respect to passages 544A, 544B (not shown) and passage 546. That is, this valve has input chamber 519 (and guide pin 536) non-symmetrically arranged with respect to the location of the plunger of actuator 142 or 143.
- the symmetrical and non-symmetrical embodiments are equivalent.
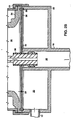
- valve device 600 includes a valve body 613 providing a cavity for a valve assembly 614, an input port 618, and an output port 620.
- Valve assembly 614 includes a proximal body 602, a distal body 604, and a fram member or assembly 626.
- Fram member 626 includes a pliable member 628 and a support member 632.
- Pliable member 628 may be a diaphragm-like member with a sliding seal 630.
- Support member 632 may be plunger-like member or a piston like member, but having a different structural and functional properties that a conventional plunger or piston.
- Valve body 602 provides a guide surface 636 located on the inside wall that includes one or several grooves 638 and 638A. These are novel grooves constructed to provide fluid passages from input chamber located peripherally (unlike the central input chamber shown in Figs. 5 and 5B).
- Fram member 626 defines a pilot chamber 642 arranged in fluid communication with actuator cavity 650 via control passages 644A and 644B. Actuator cavity 650 is in fluid communication with output chamber 621 via a control passage 646. Groove 638 (or grooves 638 and 638A) provides a communication passage between input chamber 619 and pilot chamber 642. Distal body 604 includes an annular lip seal 625 co-operatively arranged with pliable member 628 to provide a seal between input port chamber 619 and output port chamber 621. Distal body 604 also includes a flow channel 617 providing communication (in the open state) between input chamber 619 and output chamber 621 for a large amount of fluid flow.
- Pliable member 628 also includes sealing members 629A and 629B (or one sided sealing member depending on the pressure conditions) arranged to provide a sliding seal with respect to valve body 622, between pilot chamber 642 and input chamber 619. (Of course, groove 638 enables a controlled flow of fluid from input chamber 619 to pilot chamber 642, as described above.)
- the operator-control circuitry 42 is contained in a circuit housing formed of three parts, a front piece 116, a center piece 118, and a rear piece 120. Screws not shown secure the front piece 116 to the center piece 118, to which the rear piece 120 is in turn secured by screws such as screw 122. That screw threadedly engages a bushing 124 ultrasonically welded into a recess that the center housing piece 118 forms for that purpose.
- a main circuit board 126 on which are mounted a number of components such as a capacitor 128 and a microprocessor not shown, is mounted in the housing.
- An auxiliary circuit board 130 is in turn mounted on the main circuit board 126. Mounted on the auxiliary board 130 is a light-emitting diode 132, which a transmitter hood 134 also mounted on that board partially encloses.
- the front circuit-housing piece 116 forms a transmitter-lens portion 136, which has front and rear polished surfaces 138 and 140.
- the transmitter-lens portion focuses infrared light from light-emitting diode 132 through an infrared-transparent window 144 formed in the flusher housing 146.
- Fig. 1's pattern 148 represents the resultant radiation-power distribution.
- a receiver lens 152 formed by part 116 so focuses received light onto a photodiode 154 mounted on the main circuit board 126 that Fig. 1's pattern 150 of sensitivity to light reflected from targets results.
- the photodiode 154 is provided with a hood, in this case hood 156.
- the hoods 134 and 156 are opaque and tend to reduce noise and crosstalk.
- the circuit housing also limits optical noise; its center and rear parts 118 and 120 are made of opaque material such as Lexan 141 polycarbonate, while its front piece 116, being made of transparent material such as Lexan OQ2720 polycarbonate so as to enable it to form effective lenses 136 and 152, has a roughened and/or coated exterior in its non-lens regions that reduces transmission through it.
- An opaque blinder 158 mounted on front piece 116 leaves a central aperture 160 for infrared-light transmission from the light-emitting diode 132 but otherwise blocks stray transmission that could contribute to crosstalk. Also to prevent crosstalk, an opaque stop 162 is secured into a slot provided for that purpose in the circuit housing's front part 116.
- Figs. 2A in which the transmitter and receiver lenses are formed integrally with part of the circuit housing, can afford manufacturing advantages over arrangements in which the lenses are provided separately from the housing. But it may be preferable in some embodiments to make the lenses separate, because doing so affords greater flexibility in material selection for both the lens and the circuit housing.
- Figs. 6 and 6A are front-elevational and cross-sectional views of an alternative that uses this approach. That alternative includes a front circuit housing piece 116' separate from lenses 136' and 152'.
- the housing part 116' forms a teardrop-shaped rim 164 that cooperates during assembly with a similarly shaped flange 166 on lens 136' to orient that lens properly in its position on a teardrop-shaped shoulder 168 to which it is then welded ultrasonically. Referring to Fig. 6A, the teardrop shape ensures that the lens is oriented properly.
- the receiver lens 152 is mounted similarly. Since the front circuit-housing part 116' and lenses 136' and 152' do not need to be made of the same material, housing part 116' can be made of an opaque material so that blinders 170 and a stop 172 can be formed integrally with it. As was mentioned in connection with Fig. 2A, the circuit housing contains circuitry that controls the valve operator as well as other flusher components.
- Fig. 4A is a simplified block diagram of that circuitry.
- a microcontroller-based control circuit 180 operates a peripheral circuit 182 that controls the valve operator.
- Transmitter circuitry 184 including Fig. 2's light-emitting diode 132, is also operated by the control circuit 180, and receiver circuitry 186 includes the photodiode 154 and sends the control circuit its response to resultant echoes.
- the circuitry of Fig. 4A can be so implemented as to run on house power, it is more typical for it to be battery-powered, and Fig. 4A explicitly shows a battery-based power supply 188 because the control circuit 180, as will be explained below, not only receives regulated power from the power supply but also senses its unregulated power for purposes to be explained below. It also controls application of the supply's power to various of the Fig. 4A circuit's constituent parts.
- Figs. 12A and 12B (together, “Fig. 12") form a flow chart that Illustrates certain of those operations' aspects in a simplified fashion.
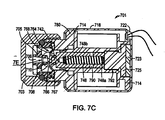
- Isolated actuator 701 includes an actuator base 716, a ferromagnetic pole piece 725, a ferromagnetic armature 740 slideably mounted in an armature pocket formed inside a bobbin 714.
- Ferromagnetic armature 740 includes a distal end 742 (i.e., plunger 742) and an armature cavity 750 having a coil spring 748.
- Coil spring 748 includes reduced ends 748a and 748b for machine handling.
- Ferromagnetic armature 740 may include one or several grooves or passages 752 providing communication from the distal end of armature 740 (outside of actuator base 716) to armature cavity 750 and to the proximal end of armature 740, at the pole piece 725, for easy movement of fluid during the displacement of the armature.
- Isolated actuator body 701 also includes a solenoid windings 728 wound about solenoid bobbin 714 and magnet 723 located in a magnet recess 720.
- Isolated actuator body 701 also includes a resiliently deformable O-ring 712 that forms a seal between solenoid bobbin 714 and actuator base 716, and includes a resiliently deformable O-ring 730 that forms a seal between solenoid bobbin 714 and pole piece 725, all of which are held together by a solenoid housing 718.
- Solenoid housing 718 i.e., can 718) is crimped at actuator base 16 to hold magnet 723 and pole piece 725 against bobbin 714 and thereby secure windings 728 and actuator base 716 together.
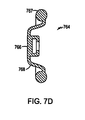
- Isolated actuator 700 also includes a resilient membrane 764 that may have various embodiments shown and described in connection with Figs. 7D and 7E.
- resilient membrane 764 is mounted between actuator base 716 and a piloting button 705 to enclose armature fluid located a fluid-tlght armature chamber in communication with an armature port 752.
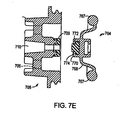
- Resilient membrane 764 includes a distal end 766, O-ring like portion 767 and a flexible portion 768. Distal end 766 comes in contact with the sealing surface in the region 708.
- Resilient membrane 764 is exposed to the pressure of regulated fluid provided via conduit 706 in piloting button 705 and may therefore be subject to considerable external force.
- resilient membrane 764 is constructed to have a relatively low permeability and high durability for thousands of openings and closings over many years of operation.
- isolated actuator 701 is provided, for storage and shipping purposes, with a cap 703 sealed with respect to the distal part of actuator base 716 and with respect to piloting button 705 using a resiliently deformable O-ring 732.
- Storage and shipping cap 703 includes usually water that counter-balances fluid contained by resilient membrane 744; this significantly limits or eliminates diffusion of fluid through resilient membrane 744.
- actuator base 716 includes a wide base portion substantially located inside can 718 and a narrowed base extension threaded on its outer surface to receive cap 703.
- the inner surface of the base extension threadedly engages complementary threads provided on the outer surface of piloting button 705.
- Membrane 764 includes a thickened peripheral rim 767 located between the base extension 32's lower face and piloting button 705. This creates a fluid-tight seal so that the membrane protects the armature from exposure to external fluid flowing in the main valve.
- the armature liquid may be water mixed with a corrosion inhibitor, e.g., a 20% mixture of polypropylene glycol and potassium phosphate.
- the armature fluid may include silicon-based fluid, polypropylene polyethylene glycol or another fluid having a large molecule.
- the armature liquid may in general be any substantially non-compressible liquid having low viscosity and preferably non-corrosive properties with respect to the armature.
- the armature liquid may be Fomblin or other liquid having low vapor pressure (but preferably high molecular size to prevent diffusion).
- the armature material can be a low-carbon steel, iron or any soft magnetic material; corrosion resistance is not as big a factor as it would otherwise be.
- Other embodiments may employ armature materials such as the 420 or 430 series stainless steels. It is only necessary that the armature consist essentially of a ferromagnetic material, i.e., a material that the solenoid and magnet can attract. Even so, it may include parts, such as, say, a flexible or other tip, that is not ferromagnetic.
- Resilient membrane 764 encloses armature fluid located a fluid-tight armature chamber in communication with an armature port 752 or 790 formed by the armature body. Furthermore, resilient membrane 764 is exposed to the pressure of regulated fluid in main valve and may therefore be subject to considerable external force. However, armature 740 and spring 750 do not have to overcome this force, because the conduit's pressure is transmitted through membrane 764 to the incompressible armature fluid within the armature chamber. The force that results from the pressure within the chamber therefore approximately balances the force that the conduit pressure exerts.
- armature 740 is free to move with respect to fluid pressures within the chamber between the retracted and extended positions.
- Armature port 752 or 790 enables the force-balancing fluid displaced from the armature chamber's lower well through the spring cavity 750 to the part of the armature chamber from which the armature's upper end (i.e. distal end) has been withdrawn upon actuation.
- armature fluid can also flow around the armature's sides, arrangements in which rapid armature motion is required should have a relatively low-flow-resistance path such as the one that port 752 or 790 helps form. Similar considerations favor use of an armature-chamber liquid that has relatively low viscosity. Therefore, the isolated operator (i.e., actuator 700) requires for operation only low amounts of electrical energy and is thus uniquely suitable for battery operation.
- armature 740 is held in the retracted position by magnet 723 in the absence of a solenoid current.
- To drive the armature to the extended position therefore requires armature current of such a direction and magnitude that the resultant magnetic force counteracts that of the magnet by enough to allow the spring force to prevail.
- the spring force moves armature 740 to its extended position, in which it causes the membrane's exterior surface to seal against the valve seat (e.g., the seat of piloting button 705). In this position, the armature is spaced enough from the magnet that the spring force can keep the armature extended without the solenoid's help.
- diaphragm membrane 764 protects armature 740 and creates a cavity that is filled with a sufficiently non-corrosive liquid, which in turn enables actuator designers to make more favorable choices between materials with high corrosion resistance and high magnetic permeability. Furthermore, membrane 764 provides a barrier to metal ions and other debris that would tend to migrate into the cavity.
- Diaphragm membrane 764 includes a sealing surface 766, which is related to the seat opening area, both of which can be increased or decreased.
- the sealing surface 766 and the seat surface of piloting button 705 can be optimized for a pressure range at which the valve actuator is designed to operate. Reducing the sealing surface 766 (and the corresponding tip of armature 740) reduces the plunger area involved in squeezing the membrane, and this in turn reduces the spring force required for a given upstream fluid-conduit pressure. On the other hand, making the plunger tip area too small tends to damage diaphragm membrane 764 during valve closing over time. Preferable range of tip-contact area to seat-opening area is between 1.4 and 12.3.
- the present actuator is suitable for variety of pressures of the controlled fluid. including pressures about 150 psi. Without any substantial modification, the valve actuator may be used in the range of about 30 psi to 80 psi, or even water pressures of about 125 psi.
- piloting button 705 has an important novel function for achieving consistent long-term piloting of the diaphragm valve shown in FIG. 2B, or the fram valve shown in FIG. 3B.
- Solenoid actuator 701 together with piloting button 705 are installed together as one assembly into the electronic faucet; this minimizes the pilot-valve-stroke variability at the pilot seat in region 708 (FIGS. 7, 7B and 7C) with respect to the closing surface (shown in detail in FIG. 7E), which variability would otherwise afflict the piloting operation.
- This installation is faster and simpler than prior art installations.
- piloting button 705 is usually put together in a factory and is permanently connected thereby holding diaphragm membrane 764 and the pressure loaded armature fluid (at pressures comparable to the pressure of the controlled fluid). Piloting button 705 is coupled to the narrow end of actuator base 716 using complementary threads or a sliding mechanism, both of which assure reproducible fixed distance between distal end 766 of diaphragm 764 and the sealing surface of piloting button 705.
- the coupling of operator 701 and piloting button 705 can be made permanent (or rigid) using glue, a set screw or pin.
- one member my include an extending region that is used to crimp the two members together after screwing or sliding on piloting button 705.
- solenoid actuator 701 without piloting button 705, but this process is somewhat more cumbersome. Without piloting button 705, the installation process requires first positioning the pilot-valve body with respect to the main valve and then securing to the actuator assembly onto the main valve as to hold the pilot-valve body in place. If proper care is not taken, there is some variability in the position of the pilot body due to various piece-part tolerances and possible deformation. This variability creates variability in the pilot-valve member's stroke. In a low-power pilot valve, even relatively small variations can affect timing or possibly sealing force adversely and even prevent the pilot valve from opening or closing at all. Thus, it is important to reduce this variability during installation, field maintenance, or replacement. On the other hand, when assembling solenoid actuator 701 with piloting button 705, this variability is eliminated or substantially reduced during the manufacturing process, and thus there is no need to take particular care during field maintenance or replacement.
- the main valve assembly includes a main valve body with a main-valve inlet, a main-valve seat, a main-valve outlet, a pressure chamber (i.e., a pilot chamber), and a pressure-relief outlet through which the pressure in the pressure chamber (pilot chamber) can be relieved, wherein the main valve member can be diaphragm 28 (Fig. 2B), a piston, or a fram member (Fig. 3B or Fig. 4), all of which are movable between a closed position, in which the main valve member seals against the main-valve seat thereby preventing flow from the main inlet (e.g., input 12 in Figs. 2B, 3B or 4) to the main outlet (e.g., output 34 in Figs. 2B, 3B or 4).
- the main valve member can be diaphragm 28 (Fig. 2B), a piston, or a fram member (Fig. 3B or Fig. 4), all of which are movable between a closed
- diaphragm membrane 764 includes an outer ring 767, flex region 768 and tip or seat region 766.
- the distal tip of the plunger is enclosed inside a pocket flange behind the sealing region 766.
- diaphragm membrane 764 is made of EPDM due to its low durometer and compression set by NSF part 61 and relatively low diffusion rates. The low diffusion rate is important to prevent the encapsulated armature fluid from leaking out during transportation or installation process.
- diaphragm member 764 can be made out of a flouro-elastomer, e.g., VITON, or a soft, low compression rubber, such as CRI-LINE® flouro-elastomer made by CRI-TECH SP-508.
- diaphragm member 764 can be made out of a Teflon-type elastomer, or just includes a Teflon coating.
- diaphragm member 764 can be made out NBR (natural rubber) having a hardness of 40-50 durometer as a means of reducing the influence of molding process variation yielding flow marks that can form micro leaks of the contained fluid into the surrounding environment.
- diaphragm member 764 includes a metallic coating that slows the diffusion thru the diaphragm member when the other is dry and exposed to air during storage or shipping of the assembled actuator.
- diaphragm member 764 has high elasticity and low compression (which is relatively difficult to achieve).
- Diaphragm member 764 may have some parts made of a low durometer material (i,e., parts 767 and 768) and other parts of high durometer material (front surface 766).
- the low compression of diaphragm member 764 is important to minimize changes in the armature stroke over a long period of operation.
- contact part 766 is made of high durometer material.
- the high elasticity is needed for easy flexing diaphragm member 764 in regions 768.
- diaphragm part 768 is relatively thin so that the diaphragm can deflect, and the plunger can move with very little force. This is important for long-term battery operation.
- diaphragm membrane 764 can be made to include a forward slug cavity 772 (in addition to the rear plunger cavity shaped to accommodate the plunger tip).
- the forward slug cavity 772 is filled with a plastic or metal slug 774.
- the forward surface 770 including the surface of slug 774 is cooperatively arranged with the sealing surface of piloting button 705.
- the sealing surface of piloting button 705 may include a pilot seat 709 made of a different material with properties designed with respect to slug 774.
- high durometer pilot seat 709 can be made of a high durometer material. Therefore, during the sealing action, resilient and relatively hard slug 772 comes in contact with a relatively soft pilot seat 709.
- This novel arrangement of diaphragm membrane 764 and piloting button 705 provides for a long term, highly reproducible sealing action.
- Diaphragm member 764 can be made by a two stage molding process where by the outer portion is molded of a softer material and the inner portion that is in contact with the pilot seat is molded of a harder elastomer or thermoplastic material using an over molding process.
- the forward facing insert 774 can be made of a hard injection molded plastic, such as acceptable copolymer or a formed metal disc of a non-corrosive non-magnetic material such as 300 series stainless steel.
- pilot seat 709 is further modified such that it contains geometry to retain pilot seat geometry made of a relatively high durometer elastomer such as EPDM 60 durometer.
- diaphragm member 764 a very compliant material. There are substantial improvements in the process related concerns of maintaining proper pilot seat geometry having no flow marks (that is a common phenomena requiring careful process controls and continual quality control vigilance). This design enables the use of an elastomeric member with a hardness that is optimized for the application.
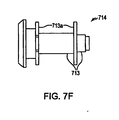
- FIG. 7F is a cross-sectional view of another embodiment of an armature bobbin used in the actuator shown in FIGS. 7 through 7C.
- the bobbin's body is constructed to have low permeability to the armature fluid.
- bobbin 714 includes metallic regions 713, which are in contact with the armature fluid, and plastic regions 713a, which are not in contact with the armature fluid.
- Fig. 8 schematically illustrates a fluid flow control system for a latching actuator 801.
- the flow control system includes again microcontroller 814, power switch 818, solenoid driver 820.
- latching actuator 701 includes at least one drive coil 728 wound on a bobbin and an armature that preferably is made of a permanent magnet.
- Microcontroller 814 provides control signals 815A and 815B to current driver 820, which drives solenoid 728 for moving armature 740.
- Solenoid driver 820 receives DC power from battery 824 and voltage regulator 826 regulates the battery power to provide a substantially constant voltage to current driver 820.
- Coil sensors 843A and 843B pickup induced voltage signal due to movement of armature 740 and provide this signal to a conditioning feedback loop that includes preamplifiers 845A, 845B and flow-pass filters 847A, 847B. That is, coil sensors 843A and 843B are used to monitor the armature position.
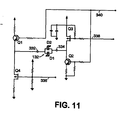
- Microcontroller 814 is again designed for efficient power operation. Between actuations, microcontroller 814 goes automatically into a low frequency sleep mode and all other electronic elements (e.g., input element or sensor 818, power driver 820, voltage regulator or voltage boost 826, signal conditioner 822) are powered down. Upon receiving an input signal from, for example, a motion sensor, microcontroller 814 turns on a power consumption controller 819 (i.e., switches on transistor Q1 in Fig. 3B). Power consumption controller 819 powers up signal conditioner 822.
- a power consumption controller 819 i.e., switches on transistor Q1 in Fig. 3B
- microcontroller 814 provides a "close" control signal 815A to solenoid driver 820, which applies a drive voltage to the coil terminals.
- the "close" control signal 815A initiates in solenoid driver 820 a drive voltage having a polarity that the resultant magnetic flux opposes the magnetic field provided by permanent magnet 723.
- This breaks the magnet 723's hold on armature 740 and allows the return spring 748 to displace valve member 740 toward valve seat 708.
- spring 748 keeps diaphragm member 764 pressed against the valve seat of piloting button 705.
- magnet 723 provides a smaller magnetic force on the armature 740 than the force provided by return spring 748.
- microcontroller 814 provides an "open" control signal 815B (i.e., latch signal) to solenoid driver 820.
- the "open" control signal 815B initiates in solenoid driver 820 a drive voltage having a polarity that the resultant magnetic flux opposes the force provided by bias spring 748.
- the resultant magnetic flux reinforces the flux provided by permanent magnet 723 and overcomes the force of spring 748.
- Permanent magnet 723 provides a force that is great enough to hold armature 740 in the open position, against the force of return spring 748, without any required magnetic force generated by coil 728.
- microcontroller 814 discontinues current flow, by proper control signal 815A or 815B applied to solenoid driver 820, after armature 740 has reached the desired open or closed state.
- Pickup coils 843A and 843B (or any sensor, in general) monitor the movement (or position) of armature 740 and determine whether armature 740 has reached its endpoint. Based on the coil sensor data from pickup coils 843A and 843B (or the sensor), microcontroller 814 stops applying the coil drive, increases the coil drive, or reduces the coil drive.
- microcontroller 814 sends OPEN signal 815B to power driver 820, which provides a drive current to coil 842 in the direction that will retract armature 740.
- coils 843A and 843B provide induced signal to the conditioning feedback loop, which includes a preamplifier and a low-pass filter. If the output of a differentiator 849 indicates less than a selected threshold calibrated for armature 740 reaching a selected position (e.g., half distance between the extended and retracted position, or fully retracted position, or another position), microcontroller 814 maintains OPEN signal 815B asserted.
- microcontroller 814 can apply a different level of OPEN signal 815B to increase the drive current (up to several time the normal drive current) provided by power driver 820. This way, the system can move armature 740, which is stuck due to mineral deposits or other problems.
- Microcontroller 814 can detect armature displacement (or even monitor armature movement) using induced signals in coils 843A and 843B provided to the conditioning feedback loop. As the output from differentiator 849 changes in response to the displacement of armature 740, microcontroller 814 can apply a different level of OPEN signal 815B, or can turn off OPEN signal 815B, which in turn directs power driver 820 to apply a different level of drive current.
- the result usually is that the drive current has been reduced, or the duration of the drive current has been much shorter than the time required to open the fluid passage under worst-case conditions (that has to be used without using an armature sensor). Therefore, the system of Fig. 8 saves considerable energy and thus extends life of battery 824.
- the arrangement of coil sensors 843A and 843B can detect latching and unlatching movement of armature 740 with great precision. (However, a single coil sensor, or multiple coil sensors, or capacitive sensors may also be used to detect movement of armature 740.)
- Microcontroller 814 can direct a selected profile of the drive current applied by power driver 820. Various profiles may be stored in , microcontroller 814 and may be actuated based on the fluid type, fluid pressure, fluid temperature, the time actuator 840 has been in operation since installation or last maintenance, a battery level, input from an external sensor (e.g., a movement sensor or a presence sensor), or other factors.
- microcontroller 814 may include a communication interface for data transfer, for example, a serial port, a parallel port, a USB port, of a wireless communication interface (e.g., an RF interface).
- the communication interface is used for downloading data to microcontroller 814 (e.g., drive curve profiles, calibration data) or for reprogramming microcontroller 814 to control a different type of actuation or calculation.
- electromagnetic actuator 701 is connected in a reverse flow arrangement when the water input is provided via passage 706 of piloting button 705.
- electromagnetic actuator 701 is connected in a forward flow arrangement when the water input is provided via passage 710 of piloting button 705 and exits via passage 706.
- the plunger In the forward flow arrangement, the plunger "faces directly" the pressure of the controlled fluid delivered by passage 710. That is, the corresponding fluid force acts against spring 748.
- the latch or unlatch times depend on the fluid pressure, but the actual latch time dependence is different.
- the latch time i.e., time it takes to retract plunger 740
- the latch time increases with the fluid pressure substantially linearly, as shown in Fig. 9B.
- the latch time decreases with the fluid pressure. Based on this latch time dependence, microcontroller 814 can calculate the actual water pressure and thus control the water amount delivery.
- Fig. 8A schematically illustrates a fluid flow control system for another embodiment of the latching actuator.
- the flow control system includes again microcontroller 814, power consumption controller 819, solenoid driver 820 receiving power from a battery 824 or voltage booster 826, and an indicator 828.
- Microcontroller 814 operates in both sleep mode and operation mode, as described above.
- Microcontroller 814 receives an input signal from an input element 818 (or any sensor) and provides control signals 815A and 815B to current driver 820, which drives the solenoid of a latching valve actuator 701.
- Solenoid driver 820 receives DC power from battery 824 and voltage regulator 826 regulates the battery power.
- a power monitor 872 monitors power signal delivered to the drive coil of actuator 701 and provides a power monitoring signal to microcontroller 814 in a feedback arrangement having operational amplifier 870.
- Microcontroller 814 and power consumption controller 19 are designed for efficient power operation, as described above.
- microcontroller 14 provides a "close" control signal 815A to solenoid driver 820, which applies a drive voltage to the actuator terminals and thus drives current through coil 728.
- Power monitor 872 may be a resistor connected for applied drive current to flow through (or a portion of the drive current) Power monitor 872 may alternatively be a coil or another element.
- the output from power monitor 872 is provided to the differentiator of signal conditioner 870. The differentiator is used to determine a latch point, as shown in Fig. 9A.
- microcontroller 814 sends CLOSE signal 815A or OPEN signal 815B to valve driver 820, which provides a drive current to coil 728 in the direction that will extent or retract armature 740 (and close or open passage 708).
- power monitor 872 provides a signal to opamp 870.
- Microcontroller 814 determines if armature 740 reached the desired state using the power monitor signal. For example, if the output of opamp 870 initially indicates no latch state for armature 740, microcontroller 814 maintains OPEN signal 815B, or applies a higher level of OPEN signal, as described above, to apply a higher drive current.
- microcontroller 814 applies a lower level of OPEN signal 815B, or turns off OPEN signal 815B. This usually reduces the duration of drive current or the level of the drive current as compared to the time or current level required to open the fluid passage under worst-case conditions. Therefore, the system of Fig. 8A saves considerable energy and thus extends life of battery 824.
- flow diagram 900 illustrates the operation of microcontroller 814 during a flushing cycle.
- Microcontroller 814 is in a sleep mode, as described above.
- microcontroller 814 Upon an input signal from the input element or external sensor, microcontroller 814 is initialed and the timer is set to zero (step 902).
- step 904 if the valve actuator performs a full flush, the time T bas equals T full (step 906). If there is no full flush, the timer is set in step 910 to T bas equals T half .
- microcontroller samples the battery voltage prior to activating the actuator in step 914. After the solenoid of the actuator is activated, microcontroller 814 searches for the latching point (see Fig.
- microcontroller 814 deactivates the solenoid (step 920).
- step 922 based on the latch time, microcontroller 814 calculates the corresponding water pressure, using stored calibration data. Based on the water pressure and the known amount of water discharged by the tank flusher, the microcontroller decides on the unlatch time, (i.e., closing time) of the actuator (step 926). After the latching time is reached, microcontroller 14 provides the "close" signal to current driver 820 (step 928). After this point the entire cycle shown in flow diagram 900 is repeated.
- blocks 200 and 202 represent the fact that the controller remains in its sleep mode until timer 190 generates a pulse.
- the processor begins executing stored programming at a predetermined entry point represented by block 204. It proceeds to perform certain initialization operations exemplified by block 206's step of setting the states of its various ports and block 208's step of detecting the state of Fig. 2's push button 210.
- That push button which is mounted on the flusher housing 146 for ready accessibility by a user, contains a magnet 210a whose proximity to the main circuit board 126 increases when the button is depressed.
- the circuit board includes a reed switch 211 that, as Fig. 6 suggests, generates an input to the control circuit in response to the resultant increased magnetic field on circuit board 126.
- Push button 210's main purpose is to enable a user to operate the flusher manually.
- the control circuit 180 ordinarily responds to that button's being depressed by initiating a flush operation if one is not already in progress, and if the button has not been depressed continuously for the previous thirty seconds.
- This thirty-second condition is imposed in order to allow batteries to be installed during manufacture without causing significant energy drain between the times when the batteries are installed in the unit and when the unit is installed in a toilet system.
- packaging for the flusher can be so designed that, when it is closed, it depresses the push button 210 and keeps it depressed so long as the packaging remains closed. It will typically have remained closed in this situation for more than thirty seconds, so, as Fig. 12's block 220 shows, the controller returns to its sleep mode without having caused any power drain greater than just enough to enable the controller to carry out a few instructions. That is, the controller has not caused power to be applied to the several circuits used for transmitting infrared radiation or driving current through the flush-valve operator.
- Block 222 represents determining whether those values are present. If not, then the controller concludes that batteries have just been installed, and it enters a power-up mode, as block 224 indicates.
- the power-up mode deals with the fact that the proportion of sensor radiation reflected back to the sensor receiver in the absence of a user differs in different environments.
- the power-up mode's purpose is to enable an installer to tell the system what that proportion is in the environment is which the flusher has been installed. This enables the system thereafter to ignore background reflections.
- the object sensor operates without opening the valve in response to target detection. Instead, it operates a visible LED whenever it detects a target, and the installer adjusts, say, a potentiometer to set the transmitter's power to a level just below that at which, in the absence of a valid target, the visible LED's illumination nonetheless indicates that a target has been detected. This tells the system what level will be considered the maximum radiation level permissible for this installation.
- the steps involved in entering this power-up mode is to apply power to certain subsystems that must remain on continually if they are to operate.
- the sensor's receiver circuit is the infrared transmitter.
- the infrared transmitter needs only to be pulsed, and power need not be applied to it between pulses, the receiver must remain powered between pulses so that it can detect the pulse echoes.
- a low-battery detector receives an unregulated output from the power supply, and it infers from that output's voltage whether the battery is running low, as block 226 indicates. If it is low, then a visible-light-emitting diode or some other annunciator, represented in Fig. 4A by block 228, is operated to give the user an indication of the low-battery state.
- block 226 the battery-check operation that block 226 represents can be reached without the system's having performed block 224's operation in the same cycle, so block 226's battery-check operation is followed by the step, represented by block 230, of determining whether the system currently is in the power-up mode.
- the system is arranged to operate in this power-up mode for ten minutes, after which the installation process has presumably been completed and a visible target-detection indicator is no longer needed. If, as determined in the block-230 operation, the system is indeed in the power-up mode, it performs block 232's step of determining whether it has been in that mode for more than ten minutes, the intended length of the calibration interval. If so, it resets the system so that it will not consider itself to be in the power-up mode the next time it awakens.
- the system determines whether a target has been detected. If is has, the system sets a flag, as block 244 indicates, to indicate that the visible LED should be turned on and thereby notify the installer of this fact. This completes the power-up-mode-specific operations.
- the system turns on a visible LED if it had previously set some flag to indicate that this should be that LED's state. This operation, represented by blocks 250 and 252, is followed by block 254's step of determining whether the valve is already open. If it is, the routine calls a further routine, represented by block 256, in which it consults timers, etc. to determine whether the valve should be closed. If it should, the routine closes the valve. The system then returns to the sleep mode.
- valve If the valve is not already open, the system applies power, as block 258 indicates, to the above-mentioned subsystems that need to have power applied continuously. Although that power will already have been applied if this step is reached from the power-up mode, it will not yet have been applied in the normal operating mode.
- That power application is required at this point because the subsystem that checks battery power needs it. That subsystem's output is then tested, as blocks 260 and 262 indicate. If the result is a conclusion that battery power is inadequate, then the system performs block 264's and block 266's steps of going back to sleep after setting a flag to indicate that it has assumed the power-up mode. Setting the flag causes any subsequent wake cycle to include closing the valve and thereby prevents uncontrolled flow that might otherwise result from a power loss. Now, it is desirable from a maintenance standpoint for the system not to go too long without flushing.
- the routine therefore causes a flush to occur and then goes to sleep, as blocks 268, 270, and 272 indicate. Otherwise, the system transmits infrared radiation into the target region and senses any resultant echoes, as block 274 indicates. It also determines whether the resultant sensed echo meets certain criteria for a valid target, as block 276 indicates.
- a typical test is to determine whether a user has been present for at least a predetermined minimum time and then has left, but several other situations may also give rise to a determination that the valve should be opened. If any of these situations occurs, the system opens the valve, as block 280 indicates. If the visible LED and analog power are on at this point, they are turned off, as block 282 indicates. As block 284 indicates, the system then goes to sleep.
- Block 276's operation of determining whether a valid target is present includes a routine that Figs. 13A and 13B together, ("Fig. 13") depict. If, as determined in the step represented by that drawing's block 288, the system is in its power-up mode, then a background gain is established in the manner explained above. Block 290 represents determining that level.
- the power-up mode's purpose is to set a background level, not to operate the flush valve, so the background-determining step 290 is followed by the block-292 operation of resetting a flag that, if set, would cause other routines to open the flush valve.
- the Fig. 13 routine then returns, as block 294 indicates.
- step of block 288 the system turns to obtaining an indication of what percentage of the transmitted radiation is reflected back to the sensor.
- a way that tends to conserve power is to vary the transmitted power in such a way as to find the transmitted-power level that results in a predetermined set value of received power.
- the transmitted-power level thereby identified is an (inverse) indication of the reflection percentage.
- the illustrated embodiment follows this approach.
- the system is arranged to transmit only at certain discrete power levels, so it in effect identifies the pair of discrete transmitted-power levels in response to which the reflected-power levels bracket the predetermined set value of received power. Specifically, it proceeds to block 296's and block 298's steps of determining whether the intensity of the reflected infrared light exceeds a predetermined threshold and, if it does, reducing the system's sensitivity-typically by reducing the transmitted infrared-light intensity-until the reflected-light intensity falls below the threshold. The result is the highest gain value that yields no target indication.
- the system would (undesirably) detect background objects, such as stall doors, whose presence should not cause flushing.
- the purpose of block 290's step was to determine what this sensitivity was, and the steps represented by blocks 300 and 302 set a no-target flag if the infrared echo is less than the threshold even with the gain at this maximum, background level. As the drawing shows, this situation also results in the flush flag's being reset and the routine's immediately returning.
- the routine proceeds to steps that impose criteria intended to detect when a user has left the facility after having used it. To impose those criteria, the routine maintains a push-down stack onto which it pushes entries from time to time. Each entry has a gain field, a timer field, and an in/out field.
- Block 304 represents determining whether the absolute value of the difference between the current gain and the gain listed in the top stack entry exceeds a threshold gain change. If it does not, the current call of this routine results in no new entry's being pushed onto the stack, but the contents of the existing top entry's timer field are incremented, as block 306 indicates. If the block-304 step's result is instead that the gain change's absolute value was indeed greater than the threshold, then the routine pushes a new entry on to the stack, placing the current gain in that entry's gain field and giving the timer field the value of zero. In short, a new entry is added whenever the target's distance changes by a predetermined step size, and it keeps track of how long the user has stayed in roughly the same place without making a movement as great as that step size.
- the routine also gives the entry's in/out field an "out" value, indicating that the target is moving away from the flusher, if the current gain exceeds the previous entry's gain, and it gives that field an "in” value if the current gain is less than the previous entry's gain. In either case, the routine then performs the block-306 step of incrementing the timer (to a value of "1") and moves from the stack-maintenance part of the routine to the part in which the valve-opening criteria are actually applied.
- Block 316 represents applying the first criterion, namely, whether the top entry's in/out field indicates that the target is moving away. If the target does not meet this criterion, the routine performs the block-292 step of setting the flush flag to the value that will cause subsequent routines not to open the flush valve, and the routine returns, as block 294 indicates. If that criterion is met, on the other hand, the routine performs block 318's step of determining whether the top entry and any immediately preceding entries indicating that the target is moving away are preceded by a sequence of a predetermined minimum number of entries that indicated that the target was moving in.
- the routine again returns after resetting the flush flag. Note that the criterion that the block-318 step applies is independent of absolute reflection percentage; it is based only on reflection-percentage changes, requiring that the reflection percentage traverse a minimum range as it increases.
- step of block 318 instead determines that the requisite number of inward-indicating entries did precede the outward-indicating entries, then the routine imposes the block-320 criterion of determining whether the last inward-movement-indicating entry has a timer value representing at least, say, 5 seconds. This criterion is imposed to prevent a flush from being triggered when the facility was not actually used. Again, the routine returns after resetting the flush flag if this criterion is not met.
- the routine imposes the criteria of blocks 322, 324, and 326, which are intended to determine whether a user has moved away adequately. If the target appears to have moved away by more then a threshold amount, as determined by block 322, or has moved away slightly less but has appeared to remain at that distance for greater then a predetermined duration, as determined in blocks 324 and 326, then, as block 328 indicates, the routine sets the flush flag before returning. Otherwise, it resets the flush flag.
- the test of Fig. 13 is typically only one of the various tests that Fig. 12B's operation 276 includes. But it gives an example of how the illustrated system reduces problems that variations in user-clothing colors would otherwise make more prevalent. As a perusal of Fig. 13 reveals, a determination of whether a user has arrived and/or left is based not on absolute gain values but rather on relative values, which result from comparing successive measurements. This reduces the problem, which afflicts other detection strategies more severely, of greater sensitivity to light-colored clothing than to dark-colored clothing.
- the illustrated system employs a visible-light-emitting diode ("visible LED").
- visible LED visible-light-emitting diode
- the visible LED's location is not crucial, so long as a user can really see its light.
- One location for instance, could be immediately adjacent to the photodiode;
- Fig. 4A shows a non-roughened region 330 in the flange of receiver-lens part 152', and the visible LED could be disposed in registration with this region.
- no such separate visible LED is apparent.
- the visible LED in that embodiment is provided as a part of a combination-LED device 132, which also includes the transmitter's infrared source.
- transmitter and annunciator circuits 184 and 228 together take the form shown in Fig. 11. That circuitry is connected to the two-color LED's terminals 332 and 334.
- the control circuit separately operates the two-color LED's infrared-light-emitting diode D1 and the visible-light-emitting diode D2 by driving control lines 336, 338, and 340 selectively. Specifically, driving line 340 high turns on transistors Q1 and Q2 and thereby drives the visible-light-emitting diode D2, at least if line 338 is held high to keep transistor Q3 turned off.
- infrared-light-emitting diode D1 is allowed to conduct, with a power that is determined by the voltage applied to a line 336 that controls transistor Q4.
- Fig. 6 illustrates packaging that takes advantage of this feature to keep power use negligible before the kit is installed, even if the kit includes installed batteries while it is in inventory or being transported.
- a prospective user may acquire a flow controller that, for example, contains all of the elements depicted in Fig. 2A except the through-diaphragm feed tube 38.
- This flow controller identified by reference numeral 348 in Fig. 15, is delivered in a container comprising a generally rectangular cardboard box 350.
- the box's top includes an inner flap 352, which is closed first, and an outer flap 354, which is closed over the inner flap. Tabs 356 that fit into slots 358 provided in the box body keep the box closed.
- the box is provided with a button activator 360 so mounted on the inner flap 352 that it registers with the push button 310 when that flap is closed.
- the package may be provided with inserts, not shown, to ensure that the flow controller's push button registers correctly with the activator.
- Fig. 6E is a detailed cross-sectional view of the button activator 360 showing it mounted on the inner flap 352 with the outer flap 354 closed over it.
- the illustrated activator 360 is typically a generally circular plastic part. It forms an annular stop ring 362, which engages the top of the flow controller's housing 146 (Fig. 2) to ensure that a central protuberance 364 depresses the push button by only the correct amount.
- To mount the activator 360 in the inner flap it is provided with a barbed post 366.
- Post 366 forms a central slot 368 that enables it to deform so that its barbs can fit through a hole 370 in the inner flap 352.
- the outer flap 354 forms another hole 372 to accommodate the barbed post 366.
- buttons actuator may be placed elsewhere in the container. It may be placed on the container's bottom wall, for example, and the force of the top flaps against the flow controller.
- Fig. 6B is a view similar to Fig. 6D, but the contents 376 of Fig. 6B's package 350' are only a subset of the kit 348 that the package 350 contains. They may, for instance, exclude Fig. 2's housing 146 as well as the pressure cap 24 and the solenoid and pilot-valve members mounted on it. So the package 350' in the Fig. 6B embodiment does not include a button activator like the one that the box 350 includes. Instead, as Fig. 6C shows, a magnet 380 is glued to the inner surface of the package 350's bottom wall 382, and a hole 384 in an insert board 386 that rests on the bottom wall 382 receives the magnet.
- the circuit assembly 376 which Fig. 6C omits for the sake of simplicity, is so placed into the package that the circuit's reed switch is disposed adjacent to the magnet. That switch is therefore closed just as it is when the push button is operated, and the circuit therefore remains asleep.
- Figs. 15 and 15A illustrate another embodiment of an automatic flusher including a flexible tube that eliminates a dynamic seal used in the flusher described in connection with Fig. 2.
- the automatic flusher includes the isolated operator 701 in a side (perpendicular) position.
- the flush valve body is indicated at 10 and may have an inlet opening 12 and a bottom directed outlet opening 14.
- the pressure of the water within this chamber holds the diaphragm 1032 upon a seat 1040 formed at the upper end of barrel which forms a conduit between the inlet 12 and the outlet 14.
- the flex tube 1050 is hollow and in the form of a flexible sleeve.
- the sleeve includes a coiled spring 1052, which prevents the tube from collapsing due to water pressure flowing downwardly through the disc of the assembly.
- the flex tube 1050 is attached to an inner cover adaptor or another element.
- a refill head Seated on top of the upper end of the guide is a refill head with the diaphragm 1032 being captured between the upper surface of the refill head and a lower surface of a radially outwardly extending portion of the disc.
- the diaphragm, the disc and the guide will all move together when pressure is relieved in chamber 1038 and the diaphragm moves upwardly to provide a direct connection between flush valve inlet 12 and flush valve outlet 14.
- the disc When this takes place, the disc will move up and will carry with it the lower end of the flex tube 1050.
- the flex tube must bend as its upper end is fixed within the passage of the inner cover 1030.
- the flex tube always provides a reliable vent passage for operation of the valve assembly.
Abstract
Description
- The present invention is directed to valve devices for bathroom flushers and methods for operating and controlling fluid flow in such flushers.
- Automatic flow-control systems have become increasingly prevalent, particularly in public rest-room facilities, both toilets and urinals. Automatic faucets and flushers contribute to hygiene, facility cleanliness, and water conservation. In such systems, object sensors detect the user and operate a flow-control valve in response to user detection. In the case of an automatic faucet, for instance, presence or motion of a user's hands in the faucet's vicinity normally results in flow from the faucet. In the case of an automatic flusher, detection of the fact that a user has approached the facility and then left is typically what triggers flushing action.
- Although the concept of such object-sensor-based automatic flow control is not new, its use has been quite limited until recently. The usage is becoming more widespread due to the recent availability of battery-powered conversion kits. These kits make it possible for manual facilities to be converted into automatic facilities through simple part replacements that do not require employing electricians to wire the system to the supply grid. A consequence of employing such battery-powered systems is that the batteries eventually need to be replaced.
- There is still a need for automatic flushers that are highly reliable and can operate for a long time without any service or just minimal service.
- There are several prior art valves for controlling water flow in different types of flushers.
GB Patent 1532210 GB 1532210 -
EP publication EP 0848193 discloses in Figs. 1 - 4 a valve including a rigid valve body with a flow inlet opening and one flow outlet, which are oriented in a substantially cross way to said inlet opening. The body of the valve has a main cavity between the flow inlet and outlet with a valve seat in the limit of the main cavity and the flow inlet. In addition, the body of the valve has one or more ducts for the control flow inlet, and one or more ducts for the outlet of the same which are associated with the control flow transfer means of the valve. These inlet ducts of control flow may be supplied from a network which is independent from the main flow. The valve has an elastomeric body in charge of regulating the flow by its opening or closing, depending on the difference of pressures produced between its walls. The elastomeric body is located inside the main cavity of the valve, wherein the elastomeric body is hollow and opened in one of its axial ends. This elastomeric body is made up of at least two coaxial zones: a sealing zone and a zone of radial sealing. InEP 0848193 , Figs. 5 - 10 disclose different embodiments of the valve, which embodiments also include a mobile axial stem. The mobile axial stem 35.3 is movable with respect to the valve body and slides with the elastomeric body. This movability of the mobile axial stem enables additional valve control of the elastomeric body regulating the flow of fluid. -
PCT Publication WO 97/04262 -
US Patent 3429333 discloses ball cocks for controlling flow of water in toilet flush tanks. -
US Patent 4488702 discloses a metering valve, or a flush valve, which incorporates a rolling diaphragm mechanism of a cylindrical elastromeric material providing a smoothly transitioning flow rate control from the full open to the full close position. The rolling diaphragm sealing means is actuated by a floating cup driven by the differential pressure between the valve fluid inlet and an intermediate actuation control chamber. The valve control is spring biased to the normally closed position and is actuated by dumping all fluid from the control chamber through a poppet mechanism. After dumping the fluid, the actuating cup is compressed by the pressure of the inlet fluids to roll the diaphragm to a substantially open position. A metering orifice within the actuating cup passes fluid from the inlet at a controlled rate to the metering chamber, which, is gradually filled with fluid and expands moving the rolling diaphragm towards the sealingly closed position. The rolling diaphragm forms an upward extension of the inner wall of the metering chamber lower section and is sealingly connected at a line adjacent to a joint f the metering chamber lower section and the upper valve body. The rolling diaphragm vertically arises to and is hermetically sealed at an upper end to the perimeter of the rolling diaphragm metering valve diaphragm actuating cup. The position of the diaphragm actuating cup controls the upward extension of the rolling diaphragm, which is affixed to the lower end of the cup 29. -
US Patent 4505450 discloses a diaphragm type valve for irrigation purposes or industrial purposes where it is desirable to control large amounts of flow energy with a small control signal. The valve includes a diaphragm chamber into which fluid is introduced to establish a fluid pressure, which normally forces the diaphragm of a diaphragm assembly against an annular seat in the valve to maintain the valve in a closed condition. A stationary bleed tube is provided which extends through the diaphragm into the diaphragm chamber. The diaphragm assembly is mounted in a body of the valve, and it includes an integral annular sealing bead tightly held between a cap and the body using a nut. When the diaphragm chamber is drained sufficiently to reduce the pressure therein to a point at which the diaphragm assembly is forced off the valve seat by the upstream fluid pressure, and the valve is opened. After some delay, the fluid is introduced into the diaphragm chamber due to the upstream fluid pressure forcing the fluid through a restricted annular passage between the bleed tube and a guide mounted on the diaphragm. The movement of the diaphragm causes the guide to move up and down with respect to the bleed tube to provide a self-cleaning action in the annular passage. -
US Patent 4911401 discloses a valve having a flexible diaphragm assembly that seals against the valve seat. The valve also includes a bleed assembly that extends into a pressure chamber located above the diaphragm for bleeding fluid pressure out of the chamber, thereby opening the valve. The bleed assembly includes a hollow tube inserted into a plastic plunger seat that is carried on the cap of the valve beneath the plunger of an actuating solenoid. Such a bleed assembly does not need a bleed tube having a precisely controlled length, and is not sensitive to flexure of the cap. The diaphragm assembly includes a cup shaped rubber diaphragm having an annular peripheral edge that is tightly clamped between the valve body and a cap of the valve when a nut is tightened thus fixedly holding the peripheral edge. - The claimed invention is directed to a valve device for bathroom flushers and a method for operating and controlling fluid flow in such flushers. In general, a bathroom flusher includes a body, a valve assembly, and an actuator. The body has an inlet and an outlet, and the valve assembly is located in the body and positioned to close water flow between the inlet and the outlet upon sealing action of a moving member at a valve seat thereby controlling flow from the inlet to the outlet. The actuator actuates operation of the moving member.
- The moving member may be a high flow rate fram member, or a standard diaphragm, or a piston. The bathroom flusher may further include an infra-red sensor assembly for detecting a urinal or toilet user. The bathroom flusher may further include different types of electromechanical, hydraulic, or only mechanical actuators.
- It is noted that a bathroom flusher includes a cover mounted upon said body and defining a pressure chamber with the valve assembly. The bathroom flusher may further include a flexible member fixed relative to the cover at one end thereof, the other end of the flexible member being attached to a movable member of the valve assembly, wherein there is a passage in said flexible member arranged to reduce pressure in said pressure chamber. The flexible member may be a hollow tube.
- Preferably, the bathroom flusher may include an automatic flow-control system. The automatic flow-control system may employ infrared-light-type object sensors.
- Disclosed in the specification is a novel design of an infrared-light-type object sensor including an indicator. In the IR sensor, an IR source (typically an infrared-light-emitting diode) is positioned behind an infrared-light-transmitting aperture as to transmit the infrared light into a target region. The indicator may be a visible-light-emitting diode included in an LED-combination device in which it is connected antiparallel to the infrared-light-emitting diode. When the combination device is driven in one direction, the infrared source shines normally through an appropriate aperture. When the device is driven in the other direction, visible light instead shines through the same aperture as the infrared light did. This arrangement avoids separate provisions for the visible light's location or transmission.
- Disclosed also is a novel algorithm for operating an automatic flusher. The automatic flusher employs an infrared-light-type object sensor for providing an output on the basis of which a control circuit decides whether to flush a toilet. After each pulse of transmitted radiation, the control circuit determines if the resultant percentage of reflected radiation differs significantly from the last, and determines whether the percentage change was positive or negative. From the determined subsequent data having a given direction and the sums of the values, the control circuit determines whether a user has approached the facility and then withdrawn from it. Based on this determination, the controller operates the flusher's valve. That is, the control circuit determines the flush criteria based on whether a period in which the reflection percentage decreased (in accordance with appropriate withdrawal criteria) has been preceded by a period in which the reflection percentage increased (in accordance with appropriate approach criteria). In this embodiment, the control circuit does not base its determination of whether the user has approached the toilet on whether the reflection percentage has exceeded a predetermined threshold, and it does not base a determination of whether the user has withdrawn from the toilet on whether the reflection percentage has fallen below a predetermined threshold.
- Disclosed in the specification is also novel system and method for storing or shipping the above-described automatic flushers. The automatic flushers may include an object sensor (e.g., an IR sensor) and a manual a push button actuator. When the flusher is operational, the push button is designed for a user to provide signal to the control circuit to open the flusher's valve. However, if the button actuator has been pressed continually for an extended period, the control circuit assumes a sleep mode, in which its power consumption is negligible. A storage or shipping container may be designed to activate the button actuator while the container is closed. As a consequence, the flusher can be packed with the control circuit's batteries installed without draining those batteries significantly during shipping and storage. Alternatively, the storage or shipping container may include an external magnet cooperatively arranged together with a reed sensor connected to the control circuit. If the magnet continually activates the reed sensor for an extended period, the control circuit assumes the sleep mode, in which its power consumption is negligible. There are also other "sleep mode inducing" devices that allow batteries to be installed without draining battery power significantly during the shipping and storage.
- The present invention is a novel valve device and the corresponding method for controlling flow-rate of fluid between the input and output ports of the valve device. A novel valve device includes a fluid input port and a fluid output port, a valve body, and a fram assembly. The valve body defines a valve cavity and includes a valve closure surface. The fram assembly provides two pressure zones and is movable within the valve cavity with respect a guiding member. The fram assembly is constructed to move to an open position enabling fluid flow from the fluid input port to the fluid output port upon reduction of pressure in a first of the two pressure zones and is constructed to move to a closed position, upon increase of pressure in the first pressure zone, creating a seal at the valve closure surface.
- According to preferred embodiments, the two pressure zones are formed by two chambers separated by the fram assembly, wherein the first pressure zone includes a pilot chamber. The guiding member may be a pin or internal walls of the valve body.
- The fram member (assembly) may include a pliable member and a stiff member, wherein the pliable member is constructed to come in contact with a valve closure surface to form seal (e.g., at a sealing lip located at the valve closure surface) in the closed position. The valve device may include a bias member. The bias member is constructed and arranged to assist movement of the fram member from the open position to the closed position. The bias member may be a spring.
- The valve is controlled, for example, by an electromechanical operator constructed and arranged to release pressure in the pilot chamber and thereby initiate movement of the fram assembly from the closed position to the open position. The operator may include a latching actuator (as described in U.S Patent 6,293,516), a non-latching actuator (as described in U.S Patent 6,305,662), or an isolated operator (as described in
PCT Application PCT/US01/51098 ). The valve may also be controlled may also including a manual operator constructed and arranged to release pressure in the pilot chamber and thereby initiate movement of the fram member from the closed position to the open position. - The novel valve device including the fram assembly may be used to regulate water flow in an automatic or manual bathroom flusher.
- It is noted that the electromagnetic actuator includes a solenoid wound around an armature housing constructed and arranged to receive an armature including a plunger partially enclosed by a membrane. The armature provides a fluid passage for displacement of armature fluid between a distal part and a proximal part of the armature thereby enabling energetically efficient movement of the armature between open and closed positions. The membrane is secured with respect to the armature housing and is arranged to seal armature fluid within an armature pocket having a fixed volume, wherein the displacement of the plunger (i.e., distal part or the armature) displaces the membrane with respect to a valve passage thereby opening or closing the passage. This enables low energy battery operation for a long time.
- Preferred embodiments of this aspect include one or more of the following features: The actuator may be a latching actuator (including a permanent magnet for holding the armature) of a non-latching actuator. The distal part of the armature is cooperatively arranged with different types of diaphragm membranes designed to act against a valve seat when the armature is disposed in its extended armature position. The electromagnetic actuator is connected to a control circuit constructed to apply said coil drive to said coil in response to an output from an optional armature sensor.
- The armature sensor can sense the armature reaching an end position (open or closed position). The control circuit can direct application of a coil drive signal to the coil in a first drive direction, and in responsive to an output from the sensor meeting a predetermined first current-termination criterion to start or stop applying coil drive to the coil in the first drive direction. The control circuit can direct or stop application of a coil drive signal to the coil responsive to an output from the sensor meeting a predetermined criterion.
- It is noted that a valve device may inclue an assembly of an electromagnetic actuator and a piloting button. The piloting button has an important novel function for achieving consistent long-term piloting of a main valve. The present invention is also a novel method for assembling a pilot-valve-operated automatic flow controller that achieves a consistent long-term performance.
- Method of assembling a pilot-valve-operated automatic flow controller includes providing a main valve assembly and a pilot-valve assembly including a stationary actuator and a pilot body member that includes a pilot-valve inlet, a pilot-valve seat, and a pilot-valve outlet. The method includes securing the pilot-valve assembly to the main valve assembly in a way that fluid flowing from a pressure-relief outlet of the main valve must flow through the pilot-valve inlet, past the pilot-valve seat, and through the pilot-valve outlet, whereby the pilot-valve assembly is positioned to control relief of the pressure in the pressure chamber (i.e., pilot chamber) of the main valve assembly. The main valve assembly includes a main valve body with a main-valve inlet, a main-valve seat, a main-valve outlet, a pressure chamber (i.e., a pilot chamber), and a pressure-relief outlet through which the pressure in the pressure chamber (pilot chamber) can be relieved. A main valve member (e.g., a diaphragm, a piston, or a fram member) is movable between a closed position, in which it seals against the main-valve seat thereby preventing flow from the main inlet to the main outlet, and an open position, in which it permits such flow. During the operation, the main valve member is exposed to the pressure in the pressure chamber (i.e., the pilot chamber) so that the pressurized pilot chamber urges the main valve member to its closed position, and the unpressurized pilot chamber (when the pressure is relieved using the pilot valve assembly) permits the main valve member to assume its open position.
- It is noted that the electromagnetic actuator system includes an actuator, a controller, and an actuator sensor. The actuator includes a solenoid coil and an armature housing constructed and arranged to receive in a movable relationship an armature. The controller is coupled to a power driver constructed to provide a drive signal to the solenoid coil for displacing the armature and thereby open or close a valve passage for fluid flow. The actuator sensor is constructed and arranged to sense a position of the armature and provide a signal to the controller.
- Preferred embodiments of this aspect include one or more of the following features: The sensor is constructed to detect voltage induced by movement of the armature. Alternatively, the sensor is constructed and arranged to detect changes to the drive signal due to the movement of the armature.
- Alternatively, the sensor includes a resistor arranged to receive at least a portion of the drive signal, and a voltmeter constructed to measure voltage across the resistor. Alternatively, the sensor includes a resistor arranged to receive at least a portion of the drive signal, and a differentiator receiving current flowing through the resistor.
- Alternatively, the sensor includes a coil sensor constructed and arranged to detect the voltage induced by movement of the armature. The coil sensor may be connected in a feedback arrangement to a signal conditioner providing conditioned signal to the controller. The signal conditioner may include a preamplifier and a low-pass filter.
- Alternatively, the system includes two coil sensors each constructed and arranged to detect the voltage induced by movement of the armature. The two coil sensors may be connected in a feedback arrangement to a differential amplifier constructed to provide a differential signal to the controller.
- The actuator sensor includes an optical sensor, a capacitance sensor, an inductance sensor, or a bridge for sensitively detecting a signal change due to movement of the armature.
- The actuator may have the armature housing constructed and arranged for a linear displacement of the armature upon the solenoid receiving the drive signal. The actuator may be a latching actuator constructed to maintain the armature in the open passage state without any drive signal being delivered to the solenoid coil. The latching actuator may include a permanent magnet arranged to maintain the armature in the open passage state. The latching actuator may further include a bias spring positioned and arranged to bias the armature toward an extended position providing a close passage state without any drive signal being delivered to the solenoid coil.
- The controller may be constructed to direct the power driver to provide the drive signal at various levels depending on the signal from the actuator sensor. The drive signal may be current. The system may include a voltage booster providing voltage to the power driver.
- The controller may be constructed to direct the power driver to provide the drive signal in a first drive direction and thereby create force on the armature to achieve a first end position. The controller is also constructed to determine whether the armature has moved in a first direction based on signal from the actuator sensor; and if the armature has not moved within a predetermined first drive duration, the controller directs application of the drive signal to the coil in the first direction at an elevated first-direction drive level that is higher than an initial level of the drive signal.
- The controller may be constructed to trigger the power driver to provide the drive signal in a first drive direction and thereby create force on the armature to achieve a first end position. The controller is also constructed to determine whether the armature has moved in a first direction based on signal from the actuator sensor, and if the armature has moved, the controller directs application of the drive signal to the coil in the first direction at a first-direction drive level that is being lower than an initial level of the drive signal.
- The actuator system may include the controller constructed to determine a characteristic of the fluid at the passage based on the signal from the actuator sensor. The characteristic of the fluid may be pressure, temperature, density, or viscosity. The actuator system may include a separate a temperature sensor for determining temperature of the fluid.
- The actuator system may include the controller constructed to determine a pressure of the fluid at the passage based on the signal from the actuator sensor. The actuator system may receive signals from an external motion sensor or a presence sensor coupled to the controller.
-
- Fig. 1 is a side elevation of a toilet and an accompanying automatic flusher.
- Fig. 1A is a side view of a urinal and an accompanying automatic flusher.
- Figs. 2A and 2B together form a cross-sectional view of a first embodiment of the flusher.
- Figs. 2A and 3B together form a cross-sectional view of a second embodiment of the flusher.
- Fig. 4 is a cross-sectional view of a third embodiment of the flusher.
- Fig. 4A is a block diagram of the flusher's control circuitry.
- Fig. 5 is an enlarged sectional view of a valve for controlling fluid flow in the flusher shown in Fig. 4.
- Fig. 5A is a perspective exploded view of the valve shown in FIG. 5.
- Fig. 5B is an enlarged sectional view of another embodiment of the valve shown in Fig 5.
- Fig. 5C is an enlarged sectional view of another embodiment of the valve shown in Fig 5.
- Fig. 6 is a front elevation of an alternative version's transmitter and receiver lenses and front circuit-housing part.
- Fig. 6A is a cross-section taken at
line 6A-6A of Fig. 6. - Fig. 6B is an isometric view of a container that can be used for a subassembly of a flusher conversion kit.
- Fig. 6C is a cross section taken at
line 6C-6C of Fig. 6B. - Fig. 6D is an isometric view of a container that may be employed for a flusher conversion kit of the type depicted in Fig. 2 or Fig. 3.
- Fig. 6E is a detailed cross section of a button-depression device included in a container.
- Fig. 7 is a sectional view of a first embodiment of an electromechanical actuator for controlling any one of the valves shown in Figs. 5 through 5B.
- Fig. 7A is a perspective exploded view of the electromechanical actuator shown in Fig. 7
- Fig. 7B is a sectional view of a second embodiment of an electromechanical actuator for controlling the valves shown in Figs. 5 through 6B.
- Fig. 7C is a sectional view of a third embodiment of an electromechanical actuator for controlling the valves shown in Figs. 5 through 6B.
- Fig. 7D is a sectional view of another embodiment of a membrane used in the actuator shown in Figs. 7 through 7C
- Figs. 7E is a sectional view of another embodiment of the membrane and a piloting button used in the actuator shown in Figs. 7 through 7C.
- Fig. 7F is a sectional view of another embodiment of an armature bobbin used in the actuator shown in Figs. 7 through 7C.
- Fig. 8 is a block diagram of another embodiment of a control system for controlling operation of the electromechanical actuator shown in Figs. 7, 7A, 7B or 7C.
- Fig. 8A is a block diagram of yet another embodiment of a control system for controlling operation of the electromechanical actuator shown in Figs. 7, 7A, 7B or 7C.
- Fig. 8B is a block diagram of data flow to a microcontroller used in the fluid flow control system of Figs. 8 or 8A.
- Figs. 9 and 9A show the relationship of current and time for the valve actuator shown in Fig. 7, 7A, 7B or 7C connected to a water line at 0 psi and120 psi reverse flow pressure, respectively.
- Fig. 9B illustrates a dependence of the latch time on the water pressure for the actuator shown in Fig. 7, 7A, 7B or 7C.
- Fig. 10 is a flow diagram of a flushing cycle used to control the flushers shown in Figs. 2, 3 or 4.
- Fig. 11 is a schematic diagram of the circuitry that the flusher uses to drive its light-emitting diodes.
- Figs. 12A, 12B, and 12C together form a simplified flow-charts a routine that the control circuitry of Fig. 4A executes.
- Figs. 13A and 13B together form a more-detailed flow chart of a step in the routine of Figs. 12A, 12B, and 12C.
- Fig. 14 illustrates a novel algorithm for controlling operation of the flushers
- Fig. 15 is a front view of another embodiment of an automatic flusher and Fig. 15A is a cross-section taken at
line 15A-15A in Fig. 15. - In Fig. 1, a
flusher 10 receives pressurized water from asupply line 12 and employs an object sensor, typically of the Infrared variety, to respond to actions of a target within atarget region 14 by selectively opening a valve that permits water from thesupply line 12 to flow through aflush conduit 16 to the bowl of atoilet 18. Fig. 1A illustrates aflusher 10 for automatically flushing aurinal 18A. As described above,flusher 10 receives pressurized water fromsupply line 12 and employs the object sensor to respond to actions of a target within atarget region 14A by selectively opening a valve that permits water from thesupply line 12 to flow through theflush conduit 16 to theurinal 18A. - Figs. 2A and 2B illustrate in detail a first embodiment of
automatic flusher 10. Fig. 2B showssupply line 12, which communicates with anannular entrance chamber 20 defined by an entrance-chamber wall 22 formed near theflush conduit 16's upper end. Apressure cap 24 secured by a retainingring 25 to the chamber housing clamps between itself and that housing theouter edge 26 of aflexible diaphragm 28 seated on amain valve seat 30 formed by theflush conduit 16's mouth. - The supply pressure that prevails In the
entrance chamber 20 tends to unseat theflexible diaphragm 28 and thereby cause it to allow water from thesupply line 12 to flow through theentrance chamber 20 Into theflush conduit 16'sinterior 32. But thediaphragm 28 ordinarily remains seated because of pressure equalization that ableed hole 34 formed by thediaphragm 28 tends to permit between theentrance chamber 20 and amain pressure chamber 36 formed by thepressure cap 24. Specifically, the pressure that thereby prevails in thatupper chamber 36 exerts greater force on thediaphragm 28 than the same pressure withinentrance chamber 20 does, because theentrance chamber 20's pressure prevails only outside theflush conduit 16, whereas the pressure in themain pressure chamber 36 prevails everywhere outside of a through-diaphragm feed tube 38. - The flusher also include a solenoid-operated actuator assembly, that can include any known solenoid or can include an
actuator assembly 40 described in U.S Patents 6,293,516 or 6,305,662. Alternatively, the solenoid-operated actuator assembly includes an isolated actuator assembly 40A described in detail in PCT ApplicationPCT/US01/51098, filed on October 25, 2001 , which is incorporated by reference as if fully reproduced herein. The isolated actuator assembly 40A is also in this application called a sealed version of the operator. - To flush the
toilet 18, the solenoid-operatedactuator assembly 40 controlled bycircuitry 42 relieves the pressure in themain pressure chamber 38 by permitting fluid flow, in a manner to be described in more detail below, between pilot entrance and exitpassages pressure cap 24's pilot-housing portion 48. A detailed description of operation is provided below. - Fig. 3 (formed by Figs. 2A and 3B) illustrates in detail a second embodiment of
automatic flusher 10. This embodiment uses a novel high flow rate valve 600 (shown in Fig. 3B) utilizing a fram assembly described in detail in connection with Fig. 5C below. Referring to Figs. 2A and 3B,automatic flusher 10 receives water input fromsupply line 12, which is in communication with apliable member 628 supported by asupport member 632 of a fram member.Grooves pilot chamber 642. The actuator relieves pressure inpilot chamber 642 and thus initiate opening ofvalve 600. Then water flows frominput supply line 12 by avalve seat 625 tooutput chamber 32. The entire flushing cycle is controlled by the solenoid-operatedactuator assembly 40 controlled bycircuitry 42, shown in Fig. 2A. A detailed description of operation is provided below. - Fig. 4 illustrates in detail a third embodiment of
automatic flusher 10.Automatic flusher 10 is a high performance, electronically controlled or manually controlled tankless flush system. Water enters thru input union 12 (supply line), preferably made of a suitable plastic resin.Union 12 is attached via thread to input fitting 12A that interacts with the building water supply system. Furthermore,union 12 is designed to rotate on its own axis when no water is present so as to facilitate alignment with the inlet supply line. - Referring still to Fig. 4,
union 12 is attached to aninlet pipe 64 by afastener 60 and aradial seal 62, which enablesunion 12 to move in or out alonginlet pipe 64. This movement can align the inlet to the supply line. However, withfastener 60 secured, there is pressure applied by the junction ofunion 12 toinlet 60. This forms a unit that is rigid and sealed throughseal number 62. The water supply travels throughunion 12 toinlet 64 and thru the inlet valve assembly in the direction ofelements Automatic flusher 10 also includes aninlet screen filter 80, which resides in a passage formed bymember 82 and is in communication with amain valve seat 525, the operation of the entire main valve is described in connection with Figs. 5, 5A and 5B. - As described connection with Figs. 5, 5A and 5B, an electro-
magnetic actuator 50 controls operation of the main valve. In the opened state, water flows betweenmain valve seat 525 and afram element 528 thru passage 528' thrupassage 528A thru passage 528B intomain outlet 32. In the closed state, thefram element 526 seals the valvemain seat 525. -
Automatic flusher 10 includes anadjustable input valve 72 controlled by rotation of avalve element 52 threaded together withvalve elements body 54 via o-ring seals Valve elements element 52, whenelement 52 is threaded all the way. The resulting force presses downelement 82 onvalve element 72 therefore creating a path frominlet 78 to passage ofbody 82. Whenvalve element 52 is unthreaded all the way,valve assembly adjustable valve 70. The spring force combined with inlet fluid pressure from 78forces element 72 againstseat 72A resulting in a sealing action.Seal element 74 blocks the flow of water to inner passage of 82, which in turn enables servicing of all internal valveelement including elements inlet 12. This is a major advantage of this embodiment. - According to another function of
adjustable valve 70, the threaded retainer is fastened part way resulting invalve body elements valve seat 72 only partly. There is a partial opening that provides a flow restriction reducing the flow of input water thruvalve 70. This novel function is designed to meet application specific requirements. In order to provide for the installer the flow restriction, the inner surface ofvalve body 54 includes application specific marks such as 1.6 W.C 1.0 GPF urinals etc. -
Automatic flusher 10 includes a sensor-based electronic flush system located inhousing 144 and described in connection with Fig. 2A. Furthermore, the sensor-based electronic flush system may be replaced by an all mechanical activation button or lever. Alternatively, the flush valve may be controlled by a hydraulically timed mechanical actuator that acts upon a hydraulic delay arrangement. Such hydraulic system can reside inhousing 144. The hydraulic system can be adjusted to a delay period commiserate with the needed flush volume for a given fixture such a 1.6 GPF W.C etc. The hydraulic delay mechanism can open the outlet orifice of the pilot section instead of electro-magnetic actuator 50 (shown in Fig. 4) for duration equal to the installer preset value. - Alternatively,
control circuitry 42 can be modified so that the sensory elements housed inhousing 144 are replaced with a timing control circuit. Upon activation of the flusher by an electro-mechanical switch (or a capacitance switch), the control circuitry initiates a flush cycle by activating electro-magnetic actuator 50 for duration equal to the preset level. This level can be set at the factory or by the installer in the field. This arrangement can be combined with the static pressure measurement scheme described below for compensating the pressure influence upon the desired volume per each flush. - The embodiment of Fig. 4 has several advantages. The hydraulic or the electro-mechanical control system can be serviced without the need to shut off the water supply to the unit. Furthermore, the valve mechanism enables controlling the quantity of fluid that is passed thru the unit. The main flush valve includes the design shown in detail in connection with Figs. 5. 5A, and 5B. This flush valve arrangement provides for a high flow rate (for its valve size) when compared to conventional diaphragm type flush valves, as shown in Fig. 2B.
- The embodiment of Fig. 4 provides fluid control valves in combination with a low power bi-stable electro magnetic actuator that combined with the described control circuitry can precisely control the delivered water volume per each flush. As described below, the capability of measuring fluid static pressure and in turn altering the main valve open time controls dynamically the delivered volume. That is, this system can deliver a selected water volume regardless of the pressure variation in the water supply line.
- The system can include a flexible conducting spring contact arrangement for converting electrical control signals from the control electronics to the electro magnetic actuator without the use of a wire/connector arrangement. The system can also enable actuation of the main flush valve using a direct mechanical lever or a mechanical level actuating upon a hydraulic delay arrangement that in turn acts upon the main valve pilot arrangement. The individual functions are described in detail below.
- Fig. 5 illustrates a preferred embodiment of a
valve 500 used in the faucet embodiment shown in FIG. 3 or 4.Valve device 500 includes avalve body 513 providing a cavity for avalve assembly 514, aninput port 518, and anoutput port 520.Valve assembly 514 includes aproximal body 522, adistal body 524, and a fram member 526 (Fig. 5A).Fram member 526 includes apliable member 528 and asupport member 532.Pliable member 528 may be a diaphragm-like member with a slidingseal 530.Support member 532 may be plunger-like member or a piston like member, but having a different structural and functional properties that a conventional plunger or piston.Valve assembly 514 also includes a guiding member such as aguide pin 536 or sliding surfaces, and includes aspring 540. -
Proximal body 522 includes threadedsurface 522A cooperatively sized with threaded surface 524A ofdistal body 524. Fram member 526 (and thuspliable member 528 and a plunger-like member 532) includes anopening 527 constructed and arranged to accommodate guidingpin 536.Fram member 526 defines apilot chamber 542 arranged in fluid communication withactuator cavity 550 viacontrol passages 544A and 544B.Actuator cavity 550 is in fluid communication withoutput port 520 via acontrol passage 546.Guide pin 536 includes a V-shaped orU-shaped groove 538 shaped and arranged together with fram opening 527 (FIG. 5A) to provide a pressure communication passage betweeninput chamber 519 andpilot chamber 542. - Referring still to Fig. 5,
distal body 524 includes anannular lip seal 525 arranged, together withpliable member 528, to provide a seal betweeninput port chamber 519 andoutput port chamber 521.Distal body 524 also includes one orseveral flow channels 517 providing communication (in open state) betweeninput chamber 519 andoutput port chamber 521.Pliable member 528 also includes sealing members 529A and 529B arranged to provide a sliding seal, with respect tovalve body 522, betweenpilot chamber 542 andoutput port chamber 521. There are various possible embodiments of seals 529A and 529B (Fig. 5). This seal may be one-sided as seal 530 (shown in FIG. 5A) or two-sided seal - The present invention envisions
valve device 10 having various sizes. For example, the "full" size embodiment, shown in FIG. 2. has the pin diameter A = 0.070", the spring diameter B = 0.360", the pliable member diameter C = 0.730", the overall fram and seal's diameter D = 0.812", the pin length E = 0.450", the body height F = 0.380", the pilot chamber height G = 0.280", the fram member size H = 0.160", and the fram excursion I = 0.100". The overall height of the valve is about 1.39" and diameter is about 1.178". - The "half size" embodiment (of the valve shown In FIG. 2) has the following dimensions provided with the same reference letters (each also including a subscript 1) shown in FIG. 2. In the "half size" valve A1 = 0.070", B1 = 0.30, C1 = 0.560", D1 = 0.650", E1 = 0.38", F1 = 0.310", G1 = 0.215", H1 = 0.125", and I1 = 0.60". The overall length of the 1/2 embodiment is about 1.350" and the diameter is about 0.855". Similarly, the valve devices of FIG. 5B or 5C may have various larger or smaller sizes.
- Referring to Figs. 5 and 5B,
valve 500 receives fluid atinput port 518, which exerts pressure onto diaphragm-like members 528 providing a seal together with alip member 525 in a closed state.Groove passage 538 provides pressure communication withpilot chamber 542, which is in communication withactuator cavity 550 viacommunication passages 544A and 544B. An actuator (shown in Figs. 4A. 5C) provides a seal atsurface 548 thereby sealingpassages 544A and 544B and thuspilot chamber 542. When the plunger of actuator 142 or 143 moves away fromsurface 548, fluid flows viapassages 544A and 544B to controlpassage 546 and tooutput port 520. This causes pressure reduction inpilot chamber 542. Therefore, diaphragm-like member 528 and piston-like member 532 move linearly withincavity 542, thereby providing a relatively large fluid opening atlip seal 525. A large volume of fluid can flow frominput port 518 tooutput port 520. - When the plunger of actuator 142 or 143 seals control
passages 544A and 544B, pressure builds up inpilot chamber 542 due to the fluid flow frominput port 518 throughgroove 538. The increased pressure inpilot chamber 542 together with the force ofspring 540 displace linearly, in a sliding motion overguide pin 536,fram member 526 toward sealing lip 529. When there is sufficient pressure inpilot chamber 542, diaphragm-likepliable member 528 seals inputport chamber 519 atlip seal 525. Preferably,soft member 528 is designed to cleangroove 538 ofguide pin 536 during the sliding motion. - The embodiment of FIG. 5 shows
valve 500 having input chamber 519 (and guide pin 536) symmetrically arranged with respect topassages 544A, 544B and 546 (and the location of the plunger ofactuator 701. However,valve device 500 may have input chamber 519 (and guide pin 536) non-symmetrically arranged with respect topassages 544A, 544B (not shown) andpassage 546. That is, this valve has input chamber 519 (and guide pin 536) non-symmetrically arranged with respect to the location of the plunger of actuator 142 or 143. The symmetrical and non-symmetrical embodiments are equivalent. - Referring to FIG. 5C,
valve device 600 includes a valve body 613 providing a cavity for avalve assembly 614, aninput port 618, and anoutput port 620.Valve assembly 614 includes aproximal body 602, adistal body 604, and a fram member or assembly 626. Fram member 626 includes apliable member 628 and asupport member 632.Pliable member 628 may be a diaphragm-like member with a sliding seal 630.Support member 632 may be plunger-like member or a piston like member, but having a different structural and functional properties that a conventional plunger or piston.Valve body 602 provides a guide surface 636 located on the inside wall that includes one orseveral grooves - Fram member 626 defines a
pilot chamber 642 arranged in fluid communication with actuator cavity 650 viacontrol passages output chamber 621 via acontrol passage 646. Groove 638 (orgrooves input chamber 619 andpilot chamber 642.Distal body 604 includes anannular lip seal 625 co-operatively arranged withpliable member 628 to provide a seal betweeninput port chamber 619 andoutput port chamber 621.Distal body 604 also includes aflow channel 617 providing communication (in the open state) betweeninput chamber 619 andoutput chamber 621 for a large amount of fluid flow.Pliable member 628 also includes sealing members 629A and 629B (or one sided sealing member depending on the pressure conditions) arranged to provide a sliding seal with respect to valve body 622, betweenpilot chamber 642 andinput chamber 619. (Of course, groove 638 enables a controlled flow of fluid frominput chamber 619 topilot chamber 642, as described above.) - We now turn to the system for controlling the operator. Regarding the embodiments shown in Fig. 2 and Fig. 3, as Fig. 2A shows, the operator-
control circuitry 42 is contained in a circuit housing formed of three parts, afront piece 116, acenter piece 118, and arear piece 120. Screws not shown secure thefront piece 116 to thecenter piece 118, to which therear piece 120 is in turn secured by screws such asscrew 122. That screw threadedly engages abushing 124 ultrasonically welded into a recess that thecenter housing piece 118 forms for that purpose. Amain circuit board 126, on which are mounted a number of components such as acapacitor 128 and a microprocessor not shown, is mounted in the housing. Anauxiliary circuit board 130 is in turn mounted on themain circuit board 126. Mounted on theauxiliary board 130 is a light-emittingdiode 132, which atransmitter hood 134 also mounted on that board partially encloses. - The front circuit-
housing piece 116 forms a transmitter-lens portion 136, which has front and rearpolished surfaces diode 132 through an infrared-transparent window 144 formed in theflusher housing 146. Fig. 1'spattern 148 represents the resultant radiation-power distribution. Areceiver lens 152 formed bypart 116 so focuses received light onto aphotodiode 154 mounted on themain circuit board 126 that Fig. 1'spattern 150 of sensitivity to light reflected from targets results. - Like the transmitter light-emitting
diode 132, thephotodiode 154 is provided with a hood, in thiscase hood 156. Thehoods rear parts front piece 116, being made of transparent material such as Lexan OQ2720 polycarbonate so as to enable it to formeffective lenses opaque blinder 158 mounted onfront piece 116 leaves acentral aperture 160 for infrared-light transmission from the light-emittingdiode 132 but otherwise blocks stray transmission that could contribute to crosstalk. Also to prevent crosstalk, anopaque stop 162 is secured into a slot provided for that purpose in the circuit housing'sfront part 116. - The arrangement of Fig. 2A, in which the transmitter and receiver lenses are formed integrally with part of the circuit housing, can afford manufacturing advantages over arrangements in which the lenses are provided separately from the housing. But it may be preferable in some embodiments to make the lenses separate, because doing so affords greater flexibility in material selection for both the lens and the circuit housing. Figs. 6 and 6A are front-elevational and cross-sectional views of an alternative that uses this approach. That alternative includes a front circuit housing piece 116' separate from lenses 136' and 152'. The housing part 116' forms a teardrop-shaped
rim 164 that cooperates during assembly with a similarly shapedflange 166 on lens 136' to orient that lens properly in its position on a teardrop-shapedshoulder 168 to which it is then welded ultrasonically. Referring to Fig. 6A, the teardrop shape ensures that the lens is oriented properly. Thereceiver lens 152 is mounted similarly. Since the front circuit-housing part 116' and lenses 136' and 152' do not need to be made of the same material, housing part 116' can be made of an opaque material so thatblinders 170 and astop 172 can be formed integrally with it. As was mentioned in connection with Fig. 2A, the circuit housing contains circuitry that controls the valve operator as well as other flusher components. - Fig. 4A is a simplified block diagram of that circuitry. A microcontroller-based
control circuit 180 operates aperipheral circuit 182 that controls the valve operator.Transmitter circuitry 184, including Fig. 2's light-emittingdiode 132, is also operated by thecontrol circuit 180, andreceiver circuitry 186 includes thephotodiode 154 and sends the control circuit its response to resultant echoes. Although the circuitry of Fig. 4A can be so implemented as to run on house power, it is more typical for it to be battery-powered, and Fig. 4A explicitly shows a battery-basedpower supply 188 because thecontrol circuit 180, as will be explained below, not only receives regulated power from the power supply but also senses its unregulated power for purposes to be explained below. It also controls application of the supply's power to various of the Fig. 4A circuit's constituent parts. - Since the circuitry is most frequently powered by battery, an important design consideration is that power not be employed unnecessarily. As a consequence, the microcontroller-based circuitry is ordinarily in a "sleep" mode, in which it draws only enough power to keep certain volatile memory refreshed and operate a
timer 190. In the illustrated embodiment, thattimer 190 generates an output pulse every 250 msec., and the control circuit responds to each pulse by performing a short operating routine before returning to the sleep mode. Figs. 12A and 12B (together, "Fig. 12") form a flow chart that Illustrates certain of those operations' aspects in a simplified fashion. - The automatic flushers shown in FIGS. 2, 3, and 4 may utilize various embodiments of the isolated actuator, shown in FIGS. 7, 7B and 7C.
Isolated actuator 701 includes anactuator base 716, aferromagnetic pole piece 725, aferromagnetic armature 740 slideably mounted in an armature pocket formed inside abobbin 714.Ferromagnetic armature 740 includes a distal end 742 (i.e., plunger 742) and anarmature cavity 750 having acoil spring 748.Coil spring 748 includes reduced ends 748a and 748b for machine handling.Ferromagnetic armature 740 may include one or several grooves orpassages 752 providing communication from the distal end of armature 740 (outside of actuator base 716) toarmature cavity 750 and to the proximal end ofarmature 740, at thepole piece 725, for easy movement of fluid during the displacement of the armature. -
Isolated actuator body 701 also includes asolenoid windings 728 wound aboutsolenoid bobbin 714 andmagnet 723 located in amagnet recess 720.Isolated actuator body 701 also includes a resiliently deformable O-ring 712 that forms a seal betweensolenoid bobbin 714 andactuator base 716, and includes a resiliently deformable O-ring 730 that forms a seal betweensolenoid bobbin 714 andpole piece 725, all of which are held together by asolenoid housing 718. Solenoid housing 718 (i.e., can 718) is crimped atactuator base 16 to holdmagnet 723 andpole piece 725 againstbobbin 714 and therebysecure windings 728 andactuator base 716 together. - Isolated actuator 700 also includes a
resilient membrane 764 that may have various embodiments shown and described in connection with Figs. 7D and 7E. As shown in FIG. 7,resilient membrane 764 is mounted betweenactuator base 716 and a pilotingbutton 705 to enclose armature fluid located a fluid-tlght armature chamber in communication with anarmature port 752.Resilient membrane 764 includes adistal end 766, O-ring likeportion 767 and aflexible portion 768.Distal end 766 comes in contact with the sealing surface in theregion 708.Resilient membrane 764 is exposed to the pressure of regulated fluid provided viaconduit 706 in pilotingbutton 705 and may therefore be subject to considerable external force. Furthermore,resilient membrane 764 is constructed to have a relatively low permeability and high durability for thousands of openings and closings over many years of operation. - Referring to still to FIG. 7,
isolated actuator 701 is provided, for storage and shipping purposes, with acap 703 sealed with respect to the distal part ofactuator base 716 and with respect to pilotingbutton 705 using a resiliently deformable O-ring 732. Storage andshipping cap 703 includes usually water that counter-balances fluid contained byresilient membrane 744; this significantly limits or eliminates diffusion of fluid throughresilient membrane 744. - Referring still to FIG. 7,
actuator base 716 includes a wide base portion substantially located inside can 718 and a narrowed base extension threaded on its outer surface to receivecap 703. The inner surface of the base extension threadedly engages complementary threads provided on the outer surface of pilotingbutton 705.Membrane 764 includes a thickenedperipheral rim 767 located between thebase extension 32's lower face and pilotingbutton 705. This creates a fluid-tight seal so that the membrane protects the armature from exposure to external fluid flowing in the main valve. - For example, the armature liquid may be water mixed with a corrosion inhibitor, e.g., a 20% mixture of polypropylene glycol and potassium phosphate. Alternatively, the armature fluid may include silicon-based fluid, polypropylene polyethylene glycol or another fluid having a large molecule. The armature liquid may in general be any substantially non-compressible liquid having low viscosity and preferably non-corrosive properties with respect to the armature. Alternatively, the armature liquid may be Fomblin or other liquid having low vapor pressure (but preferably high molecular size to prevent diffusion).
- If there is anticorrosive protection, the armature material can be a low-carbon steel, iron or any soft magnetic material; corrosion resistance is not as big a factor as it would otherwise be. Other embodiments may employ armature materials such as the 420 or 430 series stainless steels. It is only necessary that the armature consist essentially of a ferromagnetic material, i.e., a material that the solenoid and magnet can attract. Even so, it may include parts, such as, say, a flexible or other tip, that is not ferromagnetic.
-
Resilient membrane 764 encloses armature fluid located a fluid-tight armature chamber in communication with anarmature port resilient membrane 764 is exposed to the pressure of regulated fluid in main valve and may therefore be subject to considerable external force. However,armature 740 andspring 750 do not have to overcome this force, because the conduit's pressure is transmitted throughmembrane 764 to the incompressible armature fluid within the armature chamber. The force that results from the pressure within the chamber therefore approximately balances the force that the conduit pressure exerts. - Referring still to Figs. 7, 7A, 7B and 7C,
armature 740 is free to move with respect to fluid pressures within the chamber between the retracted and extended positions.Armature port spring cavity 750 to the part of the armature chamber from which the armature's upper end (i.e. distal end) has been withdrawn upon actuation. Although armature fluid can also flow around the armature's sides, arrangements in which rapid armature motion is required should have a relatively low-flow-resistance path such as the one thatport - In the latching embodiment shown in FIG. 7,
armature 740 is held in the retracted position bymagnet 723 in the absence of a solenoid current. To drive the armature to the extended position therefore requires armature current of such a direction and magnitude that the resultant magnetic force counteracts that of the magnet by enough to allow the spring force to prevail. When it does so, the spring force moves armature 740 to its extended position, in which it causes the membrane's exterior surface to seal against the valve seat (e.g., the seat of piloting button 705). In this position, the armature is spaced enough from the magnet that the spring force can keep the armature extended without the solenoid's help. - To return the armature to the illustrated, retracted position and thereby permit fluid flow, current is driven through the solenoid in the direction that causes the resultant magnetic field to reinforce that of the magnet. As was explained above, the force that the
magnet 723 exerts on the armature in the retracted position is great enough to keep it there against the spring force. However, in the non-latching embodiment that doesn't includemagnet 723,armature 740 remain in the retracted position only so long as the solenoid conducts enough current for the resultant magnetic force to exceed the spring force ofspring 748. - Advantageously,
diaphragm membrane 764 protectsarmature 740 and creates a cavity that is filled with a sufficiently non-corrosive liquid, which in turn enables actuator designers to make more favorable choices between materials with high corrosion resistance and high magnetic permeability. Furthermore,membrane 764 provides a barrier to metal ions and other debris that would tend to migrate into the cavity. -
Diaphragm membrane 764 includes a sealingsurface 766, which is related to the seat opening area, both of which can be increased or decreased. The sealingsurface 766 and the seat surface of pilotingbutton 705 can be optimized for a pressure range at which the valve actuator is designed to operate. Reducing the sealing surface 766 (and the corresponding tip of armature 740) reduces the plunger area involved in squeezing the membrane, and this in turn reduces the spring force required for a given upstream fluid-conduit pressure. On the other hand, making the plunger tip area too small tends to damagediaphragm membrane 764 during valve closing over time. Preferable range of tip-contact area to seat-opening area is between 1.4 and 12.3. The present actuator is suitable for variety of pressures of the controlled fluid. including pressures about 150 psi. Without any substantial modification, the valve actuator may be used in the range of about 30 psi to 80 psi, or even water pressures of about 125 psi. - Referring still to Figs. 7, 7A, 7B and 7C, piloting
button 705 has an important novel function for achieving consistent long-term piloting of the diaphragm valve shown in FIG. 2B, or the fram valve shown in FIG. 3B.Solenoid actuator 701 together with pilotingbutton 705 are installed together as one assembly into the electronic faucet; this minimizes the pilot-valve-stroke variability at the pilot seat in region 708 (FIGS. 7, 7B and 7C) with respect to the closing surface (shown in detail in FIG. 7E), which variability would otherwise afflict the piloting operation. This installation is faster and simpler than prior art installations. - The assembly of
operator 701 and pilotingbutton 705 is usually put together in a factory and is permanently connected thereby holdingdiaphragm membrane 764 and the pressure loaded armature fluid (at pressures comparable to the pressure of the controlled fluid). Pilotingbutton 705 is coupled to the narrow end ofactuator base 716 using complementary threads or a sliding mechanism, both of which assure reproducible fixed distance betweendistal end 766 ofdiaphragm 764 and the sealing surface of pilotingbutton 705. The coupling ofoperator 701 and pilotingbutton 705 can be made permanent (or rigid) using glue, a set screw or pin. Alternatively, one member my include an extending region that is used to crimp the two members together after screwing or sliding on pilotingbutton 705. - It is possible to install
solenoid actuator 701 without pilotingbutton 705, but this process is somewhat more cumbersome. Without pilotingbutton 705, the installation process requires first positioning the pilot-valve body with respect to the main valve and then securing to the actuator assembly onto the main valve as to hold the pilot-valve body in place. If proper care is not taken, there is some variability in the position of the pilot body due to various piece-part tolerances and possible deformation. This variability creates variability in the pilot-valve member's stroke. In a low-power pilot valve, even relatively small variations can affect timing or possibly sealing force adversely and even prevent the pilot valve from opening or closing at all. Thus, it is important to reduce this variability during installation, field maintenance, or replacement. On the other hand, when assemblingsolenoid actuator 701 with pilotingbutton 705, this variability is eliminated or substantially reduced during the manufacturing process, and thus there is no need to take particular care during field maintenance or replacement. - As described above, the main valve assembly includes a main valve body with a main-valve inlet, a main-valve seat, a main-valve outlet, a pressure chamber (i.e., a pilot chamber), and a pressure-relief outlet through which the pressure in the pressure chamber (pilot chamber) can be relieved, wherein the main valve member can be diaphragm 28 (Fig. 2B), a piston, or a fram member (Fig. 3B or Fig. 4), all of which are movable between a closed position, in which the main valve member seals against the main-valve seat thereby preventing flow from the main inlet (e.g.,
input 12 in Figs. 2B, 3B or 4) to the main outlet (e.g.,output 34 in Figs. 2B, 3B or 4). - Referring to FIGS. 7D and 7E, as described above,
diaphragm membrane 764 includes anouter ring 767,flex region 768 and tip orseat region 766. The distal tip of the plunger is enclosed inside a pocket flange behind the sealingregion 766. Preferably,diaphragm membrane 764 is made of EPDM due to its low durometer and compression set by NSF part 61 and relatively low diffusion rates. The low diffusion rate is important to prevent the encapsulated armature fluid from leaking out during transportation or installation process. Alternatively,diaphragm member 764 can be made out of a flouro-elastomer, e.g., VITON, or a soft, low compression rubber, such as CRI-LINE® flouro-elastomer made by CRI-TECH SP-508. Alternatively,diaphragm member 764 can be made out of a Teflon-type elastomer, or just includes a Teflon coating. Alternatively,diaphragm member 764 can be made out NBR (natural rubber) having a hardness of 40-50 durometer as a means of reducing the influence of molding process variation yielding flow marks that can form micro leaks of the contained fluid into the surrounding environment. Alternatively,diaphragm member 764 includes a metallic coating that slows the diffusion thru the diaphragm member when the other is dry and exposed to air during storage or shipping of the assembled actuator. - Preferably,
diaphragm member 764 has high elasticity and low compression (which is relatively difficult to achieve).Diaphragm member 764 may have some parts made of a low durometer material (i,e.,parts 767 and 768) and other parts of high durometer material (front surface 766). The low compression ofdiaphragm member 764 is important to minimize changes in the armature stroke over a long period of operation. Thus, contactpart 766 is made of high durometer material. The high elasticity is needed for easyflexing diaphragm member 764 inregions 768. Furthermore,diaphragm part 768 is relatively thin so that the diaphragm can deflect, and the plunger can move with very little force. This is important for long-term battery operation. - Referring to FIG. 7E, another embodiment of
diaphragm membrane 764 can be made to include a forward slug cavity 772 (in addition to the rear plunger cavity shaped to accommodate the plunger tip). Theforward slug cavity 772 is filled with a plastic or metal slug 774. The forward surface 770 including the surface of slug 774 is cooperatively arranged with the sealing surface of pilotingbutton 705. Specifically, the sealing surface of pilotingbutton 705 may include apilot seat 709 made of a different material with properties designed with respect to slug 774. For example, highdurometer pilot seat 709 can be made of a high durometer material. Therefore, during the sealing action, resilient and relativelyhard slug 772 comes in contact with a relativelysoft pilot seat 709. This novel arrangement ofdiaphragm membrane 764 and pilotingbutton 705 provides for a long term, highly reproducible sealing action. -
Diaphragm member 764 can be made by a two stage molding process where by the outer portion is molded of a softer material and the inner portion that is in contact with the pilot seat is molded of a harder elastomer or thermoplastic material using an over molding process. The forward facing insert 774 can be made of a hard injection molded plastic, such as acceptable copolymer or a formed metal disc of a non-corrosive non-magnetic material such as 300 series stainless steel. In this arrangement,pilot seat 709 is further modified such that it contains geometry to retain pilot seat geometry made of a relatively high durometer elastomer such asEPDM 60 durometer. By employing this design that transfers the sealing surface compliant member onto the valve seat of piloting button 705 (rather than diaphragm member 764), several key benefits are derived. Specifically, diaphragm member 764 a very compliant material. There are substantial improvements in the process related concerns of maintaining proper pilot seat geometry having no flow marks (that is a common phenomena requiring careful process controls and continual quality control vigilance). This design enables the use of an elastomeric member with a hardness that is optimized for the application. - FIG. 7F is a cross-sectional view of another embodiment of an armature bobbin used in the actuator shown in FIGS. 7 through 7C. The bobbin's body is constructed to have low permeability to the armature fluid. For example,
bobbin 714 includesmetallic regions 713, which are in contact with the armature fluid, andplastic regions 713a, which are not in contact with the armature fluid. - Fig. 8 schematically illustrates a fluid flow control system for a latching actuator 801. The flow control system includes again
microcontroller 814,power switch 818,solenoid driver 820. As shown in Fig. 7, latchingactuator 701 includes at least onedrive coil 728 wound on a bobbin and an armature that preferably is made of a permanent magnet.Microcontroller 814 providescontrol signals current driver 820, which drivessolenoid 728 for movingarmature 740.Solenoid driver 820 receives DC power frombattery 824 andvoltage regulator 826 regulates the battery power to provide a substantially constant voltage tocurrent driver 820.Coil sensors armature 740 and provide this signal to a conditioning feedback loop that includespreamplifiers pass filters 847A, 847B. That is,coil sensors -
Microcontroller 814 is again designed for efficient power operation. Between actuations,microcontroller 814 goes automatically into a low frequency sleep mode and all other electronic elements (e.g., input element orsensor 818,power driver 820, voltage regulator orvoltage boost 826, signal conditioner 822) are powered down. Upon receiving an input signal from, for example, a motion sensor,microcontroller 814 turns on a power consumption controller 819 (i.e., switches on transistor Q1 in Fig. 3B).Power consumption controller 819 powers up signal conditioner 822. - Also referring to Fig. 7, to close the
fluid passage 708,microcontroller 814 provides a "close"control signal 815A tosolenoid driver 820, which applies a drive voltage to the coil terminals. Provided bymicrocontroller 814, the "close"control signal 815A initiates in solenoid driver 820 a drive voltage having a polarity that the resultant magnetic flux opposes the magnetic field provided bypermanent magnet 723. This breaks themagnet 723's hold onarmature 740 and allows thereturn spring 748 to displacevalve member 740 towardvalve seat 708. In the closed position,spring 748 keepsdiaphragm member 764 pressed against the valve seat of pilotingbutton 705. In the closed position, there is an increased distance between the distal end ofarmature 740 andpole piece 725. Therefore,magnet 723 provides a smaller magnetic force on thearmature 740 than the force provided byreturn spring 748. - To open the fluid passage,
microcontroller 814 provides an "open"control signal 815B (i.e., latch signal) tosolenoid driver 820. The "open"control signal 815B initiates in solenoid driver 820 a drive voltage having a polarity that the resultant magnetic flux opposes the force provided bybias spring 748. The resultant magnetic flux reinforces the flux provided bypermanent magnet 723 and overcomes the force ofspring 748.Permanent magnet 723 provides a force that is great enough to holdarmature 740 in the open position, against the force ofreturn spring 748, without any required magnetic force generated bycoil 728. - Referring to Fig. 2,
microcontroller 814 discontinues current flow, byproper control signal solenoid driver 820, afterarmature 740 has reached the desired open or closed state. Pickup coils 843A and 843B (or any sensor, in general) monitor the movement (or position) ofarmature 740 and determine whetherarmature 740 has reached its endpoint. Based on the coil sensor data frompickup coils microcontroller 814 stops applying the coil drive, increases the coil drive, or reduces the coil drive. - To open the fluid passage,
microcontroller 814 sendsOPEN signal 815B topower driver 820, which provides a drive current to coil 842 in the direction that will retractarmature 740. At the same time, coils 843A and 843B provide induced signal to the conditioning feedback loop, which includes a preamplifier and a low-pass filter. If the output of adifferentiator 849 indicates less than a selected threshold calibrated forarmature 740 reaching a selected position (e.g., half distance between the extended and retracted position, or fully retracted position, or another position),microcontroller 814 maintainsOPEN signal 815B asserted. If no movement ofarmature 740 is detected,microcontroller 814 can apply a different level ofOPEN signal 815B to increase the drive current (up to several time the normal drive current) provided bypower driver 820. This way, the system can movearmature 740, which is stuck due to mineral deposits or other problems. -
Microcontroller 814 can detect armature displacement (or even monitor armature movement) using induced signals incoils differentiator 849 changes in response to the displacement ofarmature 740,microcontroller 814 can apply a different level ofOPEN signal 815B, or can turn offOPEN signal 815B, which in turn directspower driver 820 to apply a different level of drive current. The result usually is that the drive current has been reduced, or the duration of the drive current has been much shorter than the time required to open the fluid passage under worst-case conditions (that has to be used without using an armature sensor). Therefore, the system of Fig. 8 saves considerable energy and thus extends life ofbattery 824. - Advantageously, the arrangement of
coil sensors armature 740 with great precision. (However, a single coil sensor, or multiple coil sensors, or capacitive sensors may also be used to detect movement ofarmature 740.)Microcontroller 814 can direct a selected profile of the drive current applied bypower driver 820. Various profiles may be stored in ,microcontroller 814 and may be actuated based on the fluid type, fluid pressure, fluid temperature, thetime actuator 840 has been in operation since installation or last maintenance, a battery level, input from an external sensor (e.g., a movement sensor or a presence sensor), or other factors. - Optionally,
microcontroller 814 may include a communication interface for data transfer, for example, a serial port, a parallel port, a USB port, of a wireless communication interface (e.g., an RF interface). The communication interface is used for downloading data to microcontroller 814 (e.g., drive curve profiles, calibration data) or for reprogrammingmicrocontroller 814 to control a different type of actuation or calculation. - Referring to Fig. 7,
electromagnetic actuator 701 is connected in a reverse flow arrangement when the water input is provided viapassage 706 of pilotingbutton 705. Alternatively,electromagnetic actuator 701 is connected in a forward flow arrangement when the water input is provided viapassage 710 of pilotingbutton 705 and exits viapassage 706. In the forward flow arrangement, the plunger "faces directly" the pressure of the controlled fluid delivered bypassage 710. That is, the corresponding fluid force acts againstspring 748. In both forward and reverse flow arrangements, the latch or unlatch times depend on the fluid pressure, but the actual latch time dependence is different. In the reverse flow arrangement, the latch time (i.e., time it takes to retract plunger 740) increases with the fluid pressure substantially linearly, as shown in Fig. 9B. On the other hand, in the forward flow arrangement, the latch time decreases with the fluid pressure. Based on this latch time dependence,microcontroller 814 can calculate the actual water pressure and thus control the water amount delivery. - Fig. 8A schematically illustrates a fluid flow control system for another embodiment of the latching actuator. The flow control system includes again
microcontroller 814,power consumption controller 819,solenoid driver 820 receiving power from abattery 824 orvoltage booster 826, and anindicator 828.Microcontroller 814 operates in both sleep mode and operation mode, as described above.Microcontroller 814 receives an input signal from an input element 818 (or any sensor) and providescontrol signals current driver 820, which drives the solenoid of a latchingvalve actuator 701.Solenoid driver 820 receives DC power frombattery 824 andvoltage regulator 826 regulates the battery power. Apower monitor 872 monitors power signal delivered to the drive coil ofactuator 701 and provides a power monitoring signal tomicrocontroller 814 in a feedback arrangement havingoperational amplifier 870.Microcontroller 814 and power consumption controller 19 are designed for efficient power operation, as described above. - Also referring to Fig. 3, to close the fluid passage,
microcontroller 14 provides a "close"control signal 815A tosolenoid driver 820, which applies a drive voltage to the actuator terminals and thus drives current throughcoil 728.Power monitor 872 may be a resistor connected for applied drive current to flow through (or a portion of the drive current)Power monitor 872 may alternatively be a coil or another element. The output frompower monitor 872 is provided to the differentiator ofsignal conditioner 870. The differentiator is used to determine a latch point, as shown in Fig. 9A. - Similarly as described in connection with Fig. 8, to open the fluid passage,
microcontroller 814 sendsCLOSE signal 815A orOPEN signal 815B tovalve driver 820, which provides a drive current tocoil 728 in the direction that will extent or retract armature 740 (and close or open passage 708). At the same time,power monitor 872 provides a signal toopamp 870.Microcontroller 814 determines ifarmature 740 reached the desired state using the power monitor signal. For example, if the output ofopamp 870 initially indicates no latch state forarmature 740,microcontroller 814 maintainsOPEN signal 815B, or applies a higher level of OPEN signal, as described above, to apply a higher drive current. On the other hand, ifarmature 740 reached the desired state (e.g., latch state shown in Fig. 9A),microcontroller 814 applies a lower level ofOPEN signal 815B, or turns offOPEN signal 815B. This usually reduces the duration of drive current or the level of the drive current as compared to the time or current level required to open the fluid passage under worst-case conditions. Therefore, the system of Fig. 8A saves considerable energy and thus extends life ofbattery 824. - Referring to Fig. 10, flow diagram 900 illustrates the operation of
microcontroller 814 during a flushing cycle.Microcontroller 814 is in a sleep mode, as described above. Upon an input signal from the input element or external sensor,microcontroller 814 is initialed and the timer is set to zero (step 902). Instep 904, if the valve actuator performs a full flush, the time Tbas equals Tfull (step 906). If there is no full flush, the timer is set instep 910 to Tbas equals Thalf. In step 912, microcontroller samples the battery voltage prior to activating the actuator instep 914. After the solenoid of the actuator is activated,microcontroller 814 searches for the latching point (see Fig. 9 or 9A), When the timer reaches the latching point (step 918),microcontroller 814 deactivates the solenoid (step 920). Instep 922, based on the latch time,microcontroller 814 calculates the corresponding water pressure, using stored calibration data. Based on the water pressure and the known amount of water discharged by the tank flusher, the microcontroller decides on the unlatch time, (i.e., closing time) of the actuator (step 926). After the latching time is reached,microcontroller 14 provides the "close" signal to current driver 820 (step 928). After this point the entire cycle shown in flow diagram 900 is repeated. - Referring to Figs. 12A and 12B, blocks 200 and 202 represent the fact that the controller remains in its sleep mode until
timer 190 generates a pulse. When the pulse occurs, the processor begins executing stored programming at a predetermined entry point represented byblock 204. It proceeds to perform certain initialization operations exemplified byblock 206's step of setting the states of its various ports and block 208's step of detecting the state of Fig. 2'spush button 210. That push button, which is mounted on theflusher housing 146 for ready accessibility by a user, contains amagnet 210a whose proximity to themain circuit board 126 increases when the button is depressed. The circuit board includes areed switch 211 that, as Fig. 6 suggests, generates an input to the control circuit in response to the resultant increased magnetic field oncircuit board 126. -
Push button 210's main purpose is to enable a user to operate the flusher manually. As Fig. 12'sblocks control circuit 180 ordinarily responds to that button's being depressed by initiating a flush operation if one is not already in progress, and if the button has not been depressed continuously for the previous thirty seconds. - This thirty-second condition is imposed in order to allow batteries to be installed during manufacture without causing significant energy drain between the times when the batteries are installed in the unit and when the unit is installed in a toilet system. Specifically, packaging for the flusher can be so designed that, when it is closed, it depresses the
push button 210 and keeps it depressed so long as the packaging remains closed. It will typically have remained closed in this situation for more than thirty seconds, so, as Fig. 12'sblock 220 shows, the controller returns to its sleep mode without having caused any power drain greater than just enough to enable the controller to carry out a few instructions. That is, the controller has not caused power to be applied to the several circuits used for transmitting infrared radiation or driving current through the flush-valve operator. - Among the ways in which the sleep mode conserves power is that the microprocessor circuitry is not clocked, but some power is still applied to that circuitry in order to maintain certain minimal register state, including predetermined fixed values in several selected register bits. When batteries are first installed in the flusher unit, though, not all of those register bits will have the predetermined values.
Block 222 represents determining whether those values are present. If not, then the controller concludes that batteries have just been installed, and it enters a power-up mode, asblock 224 indicates. - The power-up mode deals with the fact that the proportion of sensor radiation reflected back to the sensor receiver in the absence of a user differs in different environments. The power-up mode's purpose is to enable an installer to tell the system what that proportion is in the environment is which the flusher has been installed. This enables the system thereafter to ignore background reflections. During the power-up mode, the object sensor operates without opening the valve in response to target detection. Instead, it operates a visible LED whenever it detects a target, and the installer adjusts, say, a potentiometer to set the transmitter's power to a level just below that at which, in the absence of a valid target, the visible LED's illumination nonetheless indicates that a target has been detected. This tells the system what level will be considered the maximum radiation level permissible for this installation.
- Among the steps involved in entering this power-up mode is to apply power to certain subsystems that must remain on continually if they are to operate. Among these, for instance, is the sensor's receiver circuit. Whereas the infrared transmitter needs only to be pulsed, and power need not be applied to it between pulses, the receiver must remain powered between pulses so that it can detect the pulse echoes.
- Another subsystem that requires continuous power application in the illustrated embodiment is a low-battery detector. As was mentioned above, the control circuitry receives an unregulated output from the power supply, and it infers from that output's voltage whether the battery is running low, as
block 226 indicates. If it is low, then a visible-light-emitting diode or some other annunciator, represented in Fig. 4A byblock 228, is operated to give the user an indication of the low-battery state. - Now, the battery-check operation that block 226 represents can be reached without the system's having performed block 224's operation in the same cycle, so block 226's battery-check operation is followed by the step, represented by
block 230, of determining whether the system currently is in the power-up mode. - In the illustrated embodiment, the system is arranged to operate in this power-up mode for ten minutes, after which the installation process has presumably been completed and a visible target-detection indicator is no longer needed. If, as determined in the block-230 operation, the system is indeed in the power-up mode, it performs block 232's step of determining whether it has been in that mode for more than ten minutes, the intended length of the calibration interval. If so, it resets the system so that it will not consider itself to be in the power-up mode the next time it awakens.
- For the current cycle, though, it is still in its power-up mode, and it performs certain power-up-mode operations. One of those, represented by
block 234, is to determine from the unregulated power-supply output whether any of the batteries have been installed in the wrong direction. If any have, the system simply goes back to sleep, asblock 236 indicates. Otherwise, asblock 238 indicates, the system checks its memory to determine whether it has commanded the valve operator five times in a row to close the flush valve, as the illustrated embodiment requires in the power-up mode. We have found that thus ordering the valve to close when the system is first installed tends to prevent inadvertent flushing during initial installation. - As
block 242 indicates, the system then determines whether a target has been detected. If is has, the system sets a flag, asblock 244 indicates, to indicate that the visible LED should be turned on and thereby notify the installer of this fact. This completes the power-up-mode-specific operations. - The system then proceeds with operations not specific to that mode. In the illustrated embodiment, those further operations actually are intended to be performed only once every second, whereas the timer wakes the system every 250 msec. As
block 246 indicates, therefore, the system determines whether a full second has elapsed since the last time it performed the operations that are to follow. If not, the system simply goes back to sleep, asblock 248 indicates. - If a full second has elapsed, on the other hand, the system turns on a visible LED if it had previously set some flag to indicate that this should be that LED's state. This operation, represented by
blocks block 254's step of determining whether the valve is already open. If it is, the routine calls a further routine, represented byblock 256, in which it consults timers, etc. to determine whether the valve should be closed. If it should, the routine closes the valve. The system then returns to the sleep mode. - If the valve is not already open, the system applies power, as
block 258 indicates, to the above-mentioned subsystems that need to have power applied continuously. Although that power will already have been applied if this step is reached from the power-up mode, it will not yet have been applied in the normal operating mode. - That power application is required at this point because the subsystem that checks battery power needs it. That subsystem's output is then tested, as
blocks blocks block 274 indicates. It also determines whether the resultant sensed echo meets certain criteria for a valid target, asblock 276 indicates. - The result of this determination is then fed to a series of tests, represented by
block 278, for determining whether flushing should occur. A typical test is to determine whether a user has been present for at least a predetermined minimum time and then has left, but several other situations may also give rise to a determination that the valve should be opened. If any of these situations occurs, the system opens the valve, asblock 280 indicates. If the visible LED and analog power are on at this point, they are turned off, asblock 282 indicates. Asblock 284 indicates, the system then goes to sleep. -
Block 276's operation of determining whether a valid target is present includes a routine that Figs. 13A and 13B together, ("Fig. 13") depict. If, as determined in the step represented by that drawing'sblock 288, the system is in its power-up mode, then a background gain is established in the manner explained above.Block 290 represents determining that level. - The power-up mode's purpose is to set a background level, not to operate the flush valve, so the background-determining
step 290 is followed by the block-292 operation of resetting a flag that, if set, would cause other routines to open the flush valve. The Fig. 13 routine then returns, asblock 294 indicates. - If the step of
block 288 instead indicates that the system is not in the power-up mode, the system turns to obtaining an indication of what percentage of the transmitted radiation is reflected back to the sensor. Although any way of obtaining such an indication is suitable for use with the present invention, a way that tends to conserve power is to vary the transmitted power in such a way as to find the transmitted-power level that results in a predetermined set value of received power. The transmitted-power level thereby identified is an (inverse) indication of the reflection percentage. By employing this approach, the system can so operate as to limit its transmission power to the level needed to obtain a detectable echo. - In principle, the illustrated embodiment follows this approach. In practice, the system is arranged to transmit only at certain discrete power levels, so it in effect identifies the pair of discrete transmitted-power levels in response to which the reflected-power levels bracket the predetermined set value of received power. Specifically, it proceeds to block 296's and block 298's steps of determining whether the intensity of the reflected infrared light exceeds a predetermined threshold and, if it does, reducing the system's sensitivity-typically by reducing the transmitted infrared-light intensity-until the reflected-light intensity falls below the threshold. The result is the highest gain value that yields no target indication.
- In some cases, though, the reflected-light intensity falls below the threshold even when, if the sensitivity were to be increased any further, the system would (undesirably) detect background objects, such as stall doors, whose presence should not cause flushing. The purpose of
block 290's step was to determine what this sensitivity was, and the steps represented byblocks - If the block-300 step instead results in an indication that the echo intensity can be made lower than the threshold return only if the sensitivity is below the background level, then there is a target that is not just background, and the routine proceeds to steps that impose criteria intended to detect when a user has left the facility after having used it. To impose those criteria, the routine maintains a push-down stack onto which it pushes entries from time to time. Each entry has a gain field, a timer field, and an in/out field.
-
Block 304 represents determining whether the absolute value of the difference between the current gain and the gain listed in the top stack entry exceeds a threshold gain change. If it does not, the current call of this routine results in no new entry's being pushed onto the stack, but the contents of the existing top entry's timer field are incremented, asblock 306 indicates. If the block-304 step's result is instead that the gain change's absolute value was indeed greater than the threshold, then the routine pushes a new entry on to the stack, placing the current gain in that entry's gain field and giving the timer field the value of zero. In short, a new entry is added whenever the target's distance changes by a predetermined step size, and it keeps track of how long the user has stayed in roughly the same place without making a movement as great as that step size. - As
blocks -
Block 316 represents applying the first criterion, namely, whether the top entry's in/out field indicates that the target is moving away. If the target does not meet this criterion, the routine performs the block-292 step of setting the flush flag to the value that will cause subsequent routines not to open the flush valve, and the routine returns, asblock 294 indicates. If that criterion is met, on the other hand, the routine performs block 318's step of determining whether the top entry and any immediately preceding entries indicating that the target is moving away are preceded by a sequence of a predetermined minimum number of entries that indicated that the target was moving in. If they were not, then it is unlikely that a user had actually approached the facility, used it, and then moved away, so the routine again returns after resetting the flush flag. Note that the criterion that the block-318 step applies is independent of absolute reflection percentage; it is based only on reflection-percentage changes, requiring that the reflection percentage traverse a minimum range as it increases. - If the step of
block 318 instead determines that the requisite number of inward-indicating entries did precede the outward-indicating entries, then the routine imposes the block-320 criterion of determining whether the last inward-movement-indicating entry has a timer value representing at least, say, 5 seconds. This criterion is imposed to prevent a flush from being triggered when the facility was not actually used. Again, the routine returns after resetting the flush flag if this criterion is not met. - If it is met, on the other hand, then the routine imposes the criteria of
blocks block 322, or has moved away slightly less but has appeared to remain at that distance for greater then a predetermined duration, as determined inblocks block 328 indicates, the routine sets the flush flag before returning. Otherwise, it resets the flush flag. - The test of Fig. 13 is typically only one of the various tests that Fig. 12B's
operation 276 includes. But it gives an example of how the illustrated system reduces problems that variations in user-clothing colors would otherwise make more prevalent. As a perusal of Fig. 13 reveals, a determination of whether a user has arrived and/or left is based not on absolute gain values but rather on relative values, which result from comparing successive measurements. This reduces the problem, which afflicts other detection strategies more severely, of greater sensitivity to light-colored clothing than to dark-colored clothing. - It was mentioned above that the illustrated system employs a visible-light-emitting diode ("visible LED"). In most cases, the visible LED's location is not crucial, so long as a user can really see its light. One location, for instance, could be immediately adjacent to the photodiode; Fig. 4A shows a
non-roughened region 330 in the flange of receiver-lens part 152', and the visible LED could be disposed in registration with this region. In the embodiment of Fig. 2, though, no such separate visible LED is apparent. The reason why is that the visible LED in that embodiment is provided as a part of a combination-LED device 132, which also includes the transmitter's infrared source. - To operate the two-color LED, transmitter and
annunciator circuits 184 and 228 (Fig. 4A) together take the form shown in Fig. 11. That circuitry is connected to the two-color LED'sterminals control lines line 340 high turns on transistors Q1 and Q2 and thereby drives the visible-light-emitting diode D2, at least ifline 338 is held high to keep transistor Q3 turned off. Ifline 340 is driven low, on the other hand, andline 338 is also driven low, then infrared-light-emitting diode D1 is allowed to conduct, with a power that is determined by the voltage applied to aline 336 that controls transistor Q4. - It was stated above in connection with Fig. 12's
blocks diaphragm feed tube 38. This flow controller, identified byreference numeral 348 in Fig. 15, is delivered in a container comprising a generallyrectangular cardboard box 350. The box's top includes aninner flap 352, which is closed first, and anouter flap 354, which is closed over the inner flap.Tabs 356 that fit intoslots 358 provided in the box body keep the box closed. To keep the button depressed while the box is closed, the box is provided with abutton activator 360 so mounted on theinner flap 352 that it registers with thepush button 310 when that flap is closed. The package may be provided with inserts, not shown, to ensure that the flow controller's push button registers correctly with the activator. - Fig. 6E is a detailed cross-sectional view of the
button activator 360 showing it mounted on theinner flap 352 with theouter flap 354 closed over it. The illustratedactivator 360 is typically a generally circular plastic part. It forms anannular stop ring 362, which engages the top of the flow controller's housing 146 (Fig. 2) to ensure that acentral protuberance 364 depresses the push button by only the correct amount. To mount theactivator 360 in the inner flap, it is provided with abarbed post 366.Post 366 forms acentral slot 368 that enables it to deform so that its barbs can fit through ahole 370 in theinner flap 352. Theouter flap 354 forms anotherhole 372 to accommodate thebarbed post 366. - Other arrangements may place the button actuator elsewhere in the container. It may be placed on the container's bottom wall, for example, and the force of the top flaps against the flow controller.
- Now, it sometimes occurs that the batteries are placed into the circuit even before it is assembled into the housing, and the circuit with the batteries installed may need to be shipped to a remote location for that assembly operation. Since there is as yet no housing, the circuitry cannot be kept asleep by keeping the housing's button depressed. For such situations, an approach that Figs. 6B and 6C depict can be employed.
- Fig. 6B is a view similar to Fig. 6D, but the
contents 376 of Fig. 6B's package 350' are only a subset of thekit 348 that thepackage 350 contains. They may, for instance, exclude Fig. 2'shousing 146 as well as thepressure cap 24 and the solenoid and pilot-valve members mounted on it. So the package 350' in the Fig. 6B embodiment does not include a button activator like the one that thebox 350 includes. Instead, as Fig. 6C shows, amagnet 380 is glued to the inner surface of thepackage 350'sbottom wall 382, and ahole 384 in aninsert board 386 that rests on thebottom wall 382 receives the magnet. - The
circuit assembly 376, which Fig. 6C omits for the sake of simplicity, is so placed into the package that the circuit's reed switch is disposed adjacent to the magnet. That switch is therefore closed just as it is when the push button is operated, and the circuit therefore remains asleep. - Figs. 15 and 15A illustrate another embodiment of an automatic flusher including a flexible tube that eliminates a dynamic seal used in the flusher described in connection with Fig. 2. The automatic controller shown schematically in Fig. 15 transmitter and receiver lenses and front circuit-housing part described above. The automatic flusher includes the
isolated operator 701 in a side (perpendicular) position. - The flush valve body is indicated at 10 and may have an
inlet opening 12 and a bottom directedoutlet opening 14. The area between the underside of theinner cover 1030 and the upper side of thediaphragm 1032 forms apressure chamber 1038. The pressure of the water within this chamber holds thediaphragm 1032 upon aseat 1040 formed at the upper end of barrel which forms a conduit between theinlet 12 and theoutlet 14. - Details of this operation are disclosed in
U.S. Patent 5,244,179 , as well as inU.S. Patents 4,309,781 and4,793,588 . Water flow through theinlet 12 reaches thepressure chamber 38 through a filter and bypass ring, the details of which are disclosed inU.S. Pat. No. 5,967,182 . Thus, water from the flush valve inlet reaches the pressure chamber, to maintain the diaphragm in a closed position, and the pressure chamber will be vented by the operation of the solenoid as water will flow upwardly throughpassage 44, then into chamber 1046 and then through the passage in the flex tube as described inU.S. Patent 6,382.586 . - The
flex tube 1050 is hollow and in the form of a flexible sleeve. The sleeve includes acoiled spring 1052, which prevents the tube from collapsing due to water pressure flowing downwardly through the disc of the assembly. At its upper end, theflex tube 1050 is attached to an inner cover adaptor or another element. - Seated on top of the upper end of the guide is a refill head with the
diaphragm 1032 being captured between the upper surface of the refill head and a lower surface of a radially outwardly extending portion of the disc. The diaphragm, the disc and the guide, will all move together when pressure is relieved inchamber 1038 and the diaphragm moves upwardly to provide a direct connection betweenflush valve inlet 12 andflush valve outlet 14. When this takes place, the disc will move up and will carry with it the lower end of theflex tube 1050. Thus, the flex tube must bend as its upper end is fixed within the passage of theinner cover 1030. However, the flex tube always provides a reliable vent passage for operation of the valve assembly.
Claims (23)
- A valve device (500) for bathroom flushers, comprising:a fluid input port (518) and a fluid output port (520);a valve body (513, 522, 524) defining a valve cavity and including a valve closure surface (525); anda fram assembly includingsaid fram member being constructed to be linearly slidably movable within said surface of said valve cavity with respect to said guiding pin being stationary, while said sliding seal isolating said two pressure zones during its slidable motion and said groove providing pressure communication; said fram member being constructed to move linearly to an open position enabling fluid flow from said fluid input port to said fluid output port upon reduction of pressure in a first zone of said pressure zones; and being constructed to move linearly to a closed position, upon increase of pressure in said first pressure zone, creating a seal at said valve closure surface.a fram member (526) and a sliding seal (529A, 529B, 530) acting on a surface of said cavity for providing two pressure zones (519, 542), said fram member including a support member (532) and a pliable member (528) partially surrounding said support member, said fram member including a fram opening (527) extending through said support member and said pliable member;a guiding pin (536) fixedly arranged with respect to said valve body and including a groove (538), said guiding pin extending through said fram opening to provide a pressure communication passage defined by the size of said groove and said fram opening;
- The valve device of claim 1, wherein said first pressure zone includes a pilot chamber (542) arranged in communication with an actuator cavity (550) designed for controlling said valve device by a single operator (40, 701) including a ferromagnetic armature (740) linearly displaced within a solenoid (728) constructed and arranged to release pressure in said pilot chamber and thereby initiate movement of said fram member from said closed position to said open position.
- The valve device of claim 1, wherein said sliding seal includes a one-sided seal (530).
- The valve device of claim 1, wherein said sliding seal includes a two-sided seal (529A and 529B).
- The valve device of claim 1, 3 or 4 including an operator (40, 701) including a ferromagnetic armature (740) linearly displaced within a solenoid (728) constructed and arranged to release pressure in said pilot chamber and thereby initiate movement of said fram member from said closed position to said open position.
- The valve device of claim 2 or 5, wherein said operator includes a latching actuator.
- The valve device of claim 2 or 5, wherein said operator includes a non-latching actuator.
- The valve device of claim 2 or 5, wherein said operator includes an actuator (701) having an isolation membrane (744) for containing fluid inside a plunger cavity (750) of said actuator.
- The valve device of claim 1, 2, 3 or 4 wherein said fram member comprising a pliable member (528, 628) and a stiff member (532, 632), said pliable member being constructed to come in contact with said valve closure surface to form said seal in said closed position.
- The valve device of claim 9, wherein said valve closure surface includes a lip (525, 625) providing said seal in said closed position.
- The valve device of claim 1, 2, 3 or 4 including a bias member.
- The valve device of claim 11 wherein said bias member is constructed and arranged to assist movement of said fram member from said open position to said closed position.
- The valve device of claim 11 wherein said bias member includes a spring (540, 640).
- The valve device of any one of the above claims, wherein said valve device is constructed to function inside a bathroom flusher (10) connected to a pressurized water supply and arranged to control water flow.
- The valve device of claim 1, wherein said operator is actuated by a controller (814) receiving a signal from a sensor (830).
- The valve device of claim 15, wherein said operator, said controller, and said sensor are powered by a battery.
- The valve device of claim 2 further including two control passages (544A, 544B) connecting said pilot chamber to said actuator cavity, said control passages being symmetrically located with respect to said guiding pin.
- The valve device of claim 2 further including two control passages connecting said pilot chamber to said actuator cavity, said control passages being non-symmetrically located with respect to said guiding pin.
- The valve device of claim 2 wherein said guiding pin is symmetrically located with respect to an input chamber (519) in communication with said fluid input port.
- The valve device of claim 2 wherein said guiding pin is non-symmetrically located with respect to an input chamber (519) in communication with said fluid input port.
- A method of controlling fluid flow in bathroom flushers using a valve device, comprising:providing a fluid input port and a fluid output port associated with a valve body defining a valve cavity and including a valve closure surface;providing a fram assembly including a fram member and a sliding seal acting on a surface of said cavity for defining two pressure zones and being movable within said valve cavity with respect a guiding member; said sliding seal being constructed to isolate a first of said pressure zones from a second of said pressure zones; said fram member including a support member and a pliable member partially surrounding said support member, said fram member including a fram opening extending through said support member and said pliable member; a guiding pin fixedly arranged with respect to said valve body and including a groove, said guiding pin extending through said fram opening to provide a pressure communication passage defined by the size of said groove and said fram opening;reducing a pressure in the first of said pressure zones and thereby initiating linear slidable movement of said fram member within said surface of said valve cavity with respect to said guiding pin being stationary, while said sliding seal isolating said two pressure zones during its slidable motion and said groove providing pressure communication, said pressure reduction causing an open position enabling fluid flow from said fluid input port to said fluid output port; andclosing a control passage to increase of pressure in said first pressure zone and thereby gradually increasing pressure in said first pressure zone via said pressure communication passage thereby initiating movement of said fram assembly from said open position to said closed position preventing fluid flow from said fluid input port to said fluid output port.
- The method of claim 21 wherein said reducing the pressure includes activating an operator.
- The method of claim 21 or 22 wherein said opening and closing is used to control water flow inside a bathroom flusher connected to a pressurized water supply.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP07016835.6A EP1892341B1 (en) | 2001-12-04 | 2002-12-04 | Automatic bathroom flushers |
Applications Claiming Priority (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12226 | 1987-02-09 | ||
| US12252 | 1998-01-23 | ||
| US10/012,252 US6691979B2 (en) | 2001-12-04 | 2001-12-04 | Adaptive object-sensing system for automatic flusher |
| US10/012,226 US6619614B2 (en) | 2001-12-04 | 2001-12-04 | Automatic flow controller employing energy-conservation mode |
| US36216602P | 2002-03-05 | 2002-03-05 | |
| US362166P | 2002-03-05 | ||
| US39128202P | 2002-06-24 | 2002-06-24 | |
| US391282P | 2002-06-24 | ||
| US42437802P | 2002-11-06 | 2002-11-06 | |
| US424378P | 2002-11-06 | ||
| PCT/US2002/038758 WO2003048464A2 (en) | 2001-12-04 | 2002-12-04 | Automatic bathroom flushers |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07016835.6A Division EP1892341B1 (en) | 2001-12-04 | 2002-12-04 | Automatic bathroom flushers |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1451415A1 EP1451415A1 (en) | 2004-09-01 |
| EP1451415B1 true EP1451415B1 (en) | 2007-08-29 |
Family
ID=27533471
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP02784724A Expired - Lifetime EP1451415B1 (en) | 2001-12-04 | 2002-12-04 | Automatic bathroom flushers |
Country Status (9)
| Country | Link |
|---|---|
| EP (1) | EP1451415B1 (en) |
| JP (3) | JP4523277B2 (en) |
| CN (1) | CN1320221C (en) |
| AT (1) | ATE371774T1 (en) |
| AU (1) | AU2002346652A1 (en) |
| CA (1) | CA2469189C (en) |
| DE (1) | DE60222169T2 (en) |
| MX (1) | MXPA04005485A (en) |
| WO (1) | WO2003048464A2 (en) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007098269A2 (en) * | 2006-02-27 | 2007-08-30 | Sloan Valve Company | Dual flush activation |
| EP2213714B1 (en) | 2009-02-02 | 2014-06-11 | The Procter and Gamble Company | Liquid hand dishwashing detergent composition |
| PL2213713T3 (en) | 2009-02-02 | 2014-07-31 | Procter & Gamble | Liquid hand dishwashing detergent composition |
| US8434172B2 (en) | 2009-04-28 | 2013-05-07 | Masco Canada Limited | Dual flush electronic flush valve |
| US9885425B2 (en) | 2011-03-17 | 2018-02-06 | T&D Corporation | Valve system |
| US9228334B2 (en) * | 2011-12-19 | 2016-01-05 | Defond Components Limited | Liquid-operated actuator assembly, particularly for a flush toilet, and flush toilet incorporating the assembly |
| US20130307550A1 (en) * | 2012-05-18 | 2013-11-21 | O2Micro Inc. | State of charge indicators for battery packs |
| PT108396A (en) * | 2015-04-22 | 2015-12-29 | Acail Gas Sa | EQUIPMENT FOR CONTROLLING, MEASURING AND COMMUNICATING A PHYSICAL GREATNESS OF A CONTENTOR CONTAINING A FLUID UNDER PRESSURE |
| CN206617634U (en) * | 2017-03-27 | 2017-11-07 | 上海荣威塑胶工业有限公司 | Thrift lock and squirt toy |
| US11073442B2 (en) * | 2017-12-21 | 2021-07-27 | Swagelok Company | Systems and methods for control and monitoring of actuated valves |
| US11828449B2 (en) | 2020-07-17 | 2023-11-28 | Sloan Valve Company | Light ring for plumbing fixtures |
| CN113229114B (en) * | 2021-06-07 | 2022-07-29 | 塔里木大学 | Drip irrigation device for desert highway protection forest |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3429333A (en) * | 1966-06-23 | 1969-02-25 | Adolf Schoepe | Ball cock |
| GB1532210A (en) * | 1975-10-27 | 1978-11-15 | Reed International Ltd | Valve assemblies |
| US4488702A (en) * | 1983-09-29 | 1984-12-18 | Lapeyre James M | Rolling diaphragm metering valve |
| WO1997004262A1 (en) * | 1995-07-18 | 1997-02-06 | Tiefenbach Gmbh | Pilot operated hydraulic closure valve |
| EP0848193A1 (en) * | 1996-11-20 | 1998-06-17 | Sergio Perez Corbalan | Flow valve operated by flow transfer means which regulate small flows of control |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5367245A (en) * | 1976-11-27 | 1978-06-15 | Toto Ltd | Apparatus for washing toilet bowl |
| US4309781A (en) | 1980-05-09 | 1982-01-12 | Sloan Valve Company | Automatic flushing system |
| JPS5721638A (en) * | 1980-07-12 | 1982-02-04 | Mineo Nishiku | Automatic water discharger exclusively designed for male flush toilet |
| CN86206149U (en) * | 1986-08-23 | 1987-07-15 | 瓯海县科教实验厂 | Self-closing rinsing valve |
| CN87210709U (en) * | 1987-11-06 | 1988-05-25 | 王延玲 | Self-closed flush valve |
| US4793588A (en) | 1988-04-19 | 1988-12-27 | Coyne & Delany Co. | Flush valve with an electronic sensor and solenoid valve |
| US5032812A (en) * | 1990-03-01 | 1991-07-16 | Automatic Switch Company | Solenoid actuator having a magnetic flux sensor |
| US5169118A (en) * | 1992-02-11 | 1992-12-08 | Sloan Valve Company | Sensor-operated battery-powered flush valve |
| US5244179A (en) * | 1992-08-21 | 1993-09-14 | Sloan Valve Company | Diaphragm stop for sensor-operated, battery-powered flush valve |
| JP3173194B2 (en) * | 1992-12-08 | 2001-06-04 | 東陶機器株式会社 | Solenoid valve |
| CN2172313Y (en) * | 1993-10-29 | 1994-07-20 | 邱斌 | Press delyed self-closed toilet flushing valve |
| JP2502946B2 (en) * | 1994-05-23 | 1996-05-29 | 東陶機器株式会社 | Water supply control device |
| JP3705380B2 (en) * | 1996-08-23 | 2005-10-12 | 東陶機器株式会社 | Object detection device |
| US5967182A (en) | 1997-11-04 | 1999-10-19 | Sloan Valley Company | Outside filter for flush valve |
| JPH11158971A (en) * | 1997-11-26 | 1999-06-15 | Toto Ltd | Stool flushing device |
| JP2001065029A (en) * | 1999-08-26 | 2001-03-13 | Nekkusu:Kk | Electronical automatic cock for toilet bowl |
| US6293516B1 (en) | 1999-10-21 | 2001-09-25 | Arichell Technologies, Inc. | Reduced-energy-consumption actuator |
| AU2001229451A1 (en) | 2000-01-14 | 2001-07-24 | Jon L. Roberts | Infant utensil sterilization method and apparatus |
| JP2001311191A (en) * | 2000-02-25 | 2001-11-09 | Toto Ltd | Moving body detection system |
| US6305662B1 (en) * | 2000-02-29 | 2001-10-23 | Arichell Technologies, Inc. | Reduced-energy-consumption actuator |
| US6382586B1 (en) | 2000-12-14 | 2002-05-07 | Sloan Valve Company | Flush valve assembly with flex tube |
-
2002
- 2002-12-04 MX MXPA04005485A patent/MXPA04005485A/en active IP Right Grant
- 2002-12-04 AU AU2002346652A patent/AU2002346652A1/en not_active Abandoned
- 2002-12-04 WO PCT/US2002/038758 patent/WO2003048464A2/en active IP Right Grant
- 2002-12-04 CA CA2469189A patent/CA2469189C/en not_active Expired - Lifetime
- 2002-12-04 JP JP2003549637A patent/JP4523277B2/en not_active Expired - Lifetime
- 2002-12-04 EP EP02784724A patent/EP1451415B1/en not_active Expired - Lifetime
- 2002-12-04 CN CNB028240022A patent/CN1320221C/en not_active Expired - Lifetime
- 2002-12-04 AT AT02784724T patent/ATE371774T1/en not_active IP Right Cessation
- 2002-12-04 DE DE60222169T patent/DE60222169T2/en not_active Expired - Lifetime
-
2009
- 2009-10-07 JP JP2009233809A patent/JP5580018B2/en not_active Expired - Lifetime
-
2012
- 2012-05-22 JP JP2012116744A patent/JP5683531B2/en not_active Expired - Lifetime
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3429333A (en) * | 1966-06-23 | 1969-02-25 | Adolf Schoepe | Ball cock |
| GB1532210A (en) * | 1975-10-27 | 1978-11-15 | Reed International Ltd | Valve assemblies |
| US4488702A (en) * | 1983-09-29 | 1984-12-18 | Lapeyre James M | Rolling diaphragm metering valve |
| WO1997004262A1 (en) * | 1995-07-18 | 1997-02-06 | Tiefenbach Gmbh | Pilot operated hydraulic closure valve |
| EP0848193A1 (en) * | 1996-11-20 | 1998-06-17 | Sergio Perez Corbalan | Flow valve operated by flow transfer means which regulate small flows of control |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2469189A1 (en) | 2003-06-12 |
| JP2012229803A (en) | 2012-11-22 |
| AU2002346652A1 (en) | 2003-06-17 |
| JP2010059783A (en) | 2010-03-18 |
| CA2469189C (en) | 2011-02-01 |
| CN1599828A (en) | 2005-03-23 |
| JP4523277B2 (en) | 2010-08-11 |
| JP2005511923A (en) | 2005-04-28 |
| MXPA04005485A (en) | 2005-04-19 |
| JP5580018B2 (en) | 2014-08-27 |
| DE60222169T2 (en) | 2008-05-21 |
| EP1451415A1 (en) | 2004-09-01 |
| JP5683531B2 (en) | 2015-03-11 |
| WO2003048464A2 (en) | 2003-06-12 |
| DE60222169D1 (en) | 2007-10-11 |
| CN1320221C (en) | 2007-06-06 |
| ATE371774T1 (en) | 2007-09-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7156363B2 (en) | Bathroom flushers with novel sensors and controllers | |
| US20130061380A1 (en) | Automatic bathroom flushers | |
| US7437778B2 (en) | Automatic bathroom flushers | |
| JP5683531B2 (en) | Automatic toilet flushing device | |
| CA2469182C (en) | Electronic faucets for long-term operation | |
| US6619614B2 (en) | Automatic flow controller employing energy-conservation mode | |
| US6691979B2 (en) | Adaptive object-sensing system for automatic flusher | |
| US20130061381A1 (en) | Bathroom flushers with novel sensors and controllers | |
| AU2010200810A1 (en) | Toilet flusher for water tanks with novel valves and dispensers | |
| EP1892341B1 (en) | Automatic bathroom flushers | |
| CA2724696C (en) | Automatic bathroom flushers | |
| US20110017929A1 (en) | Low volume automatic bathroom flushers | |
| CA2732227C (en) | Bathroom flushers with novel sensors and controllers |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20040628 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR IE IT LI LU MC NL PT SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK RO |
|
| 17Q | First examination report despatched |
Effective date: 20041021 |
|
| 17Q | First examination report despatched |
Effective date: 20041021 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR IE IT LI LU MC NL PT SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REF | Corresponds to: |
Ref document number: 60222169 Country of ref document: DE Date of ref document: 20071011 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: RIEDERER HASLER & PARTNER PATENTANWAELTE AG |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071210 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070829 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070829 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070829 |
|
| ET | Fr: translation filed | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071130 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070829 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070829 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070829 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080129 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071129 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20071231 |
|
| 26N | No opposition filed |
Effective date: 20080530 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070829 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070829 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070829 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20071204 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071129 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070829 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IE Payment date: 20101227 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20071231 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20101227 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20101224 Year of fee payment: 9 |
|
| BERE | Be: lapsed |
Owner name: ARICHELL TECHNOLOGIES, INC. Effective date: 20111231 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111231 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111231 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111204 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111231 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20131227 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20131217 Year of fee payment: 12 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20141204 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20150831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20141204 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20141231 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20211227 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 60222169 Country of ref document: DE |